Isaac ROS Image Pipeline#


Overview#
Isaac ROS Image Pipeline is a metapackage of functionality for image processing. Camera output often needs pre-processing to meet the input requirements of multiple different perception functions. This can include cropping, resizing, mirroring, correcting for lens distortion, and color space conversion. For stereo cameras, additional processing is required to produce disparity between left + right images and a point cloud for depth perception.
This package is accelerated using the GPU and specialized hardware
engines for image computation, replacing the CPU-based
image_pipeline metapackage.
Considerable effort has been made to ensure that replacing
image_pipeline with isaac_ros_image_pipeline on a Jetson or GPU
is as painless a transition as possible.
Note
Some image pre-processing functions use specialized hardware engines, which offload the GPU to make more compute available for other tasks.
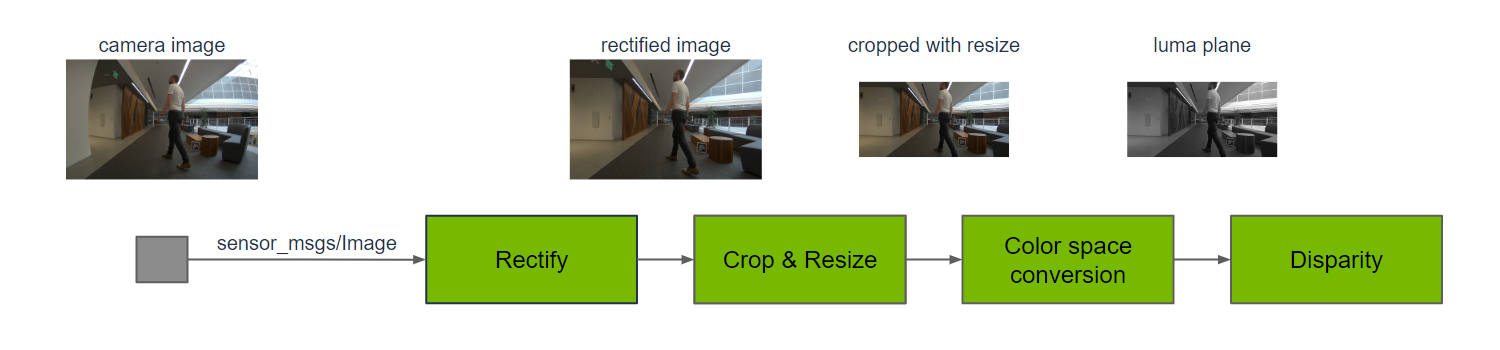
Rectify corrects for lens distortion from the received camera sensor
message. The rectified image is resized to the input resolution for
disparity, using a crop before resizing to maintain image aspect ratio.
The image is color space converted to YUV from RGB using the luma
channel (the Y in YUV) to compute disparity using
SGM. This
common graph of nodes can be performed without the CPU processing a
single pixel using isaac_ros_image_pipeline; in comparison, using
image_pipeline, the CPU would process each pixel ~3 times.
The Isaac ROS Image Pipeline metapackage offloads the CPU from common image processing tasks so it can perform robotics functions best suited for the CPU.
Quickstarts#
Isaac ROS NITROS Acceleration#
This package is powered by NVIDIA Isaac Transport for ROS (NITROS), which leverages type adaptation and negotiation to optimize message formats and dramatically accelerate communication between participating nodes.
Packages#
Supported Platforms#
This package is designed and tested to be compatible with ROS 2 Jazzy running on Jetson, an x86_64 system with an NVIDIA GPU, or a DGX Spark workstation. Other GB10 based platforms may function, but are not part of the test matrix and we cannot guarantee their behavior.
Platform |
Hardware |
Software |
Storage |
Notes |
|---|---|---|---|---|
Jetson |
128+ GB NVMe SSD |
For best performance, ensure that power settings are configured appropriately. |
||
x86_64 |
|
32+ GB disk space available |
||
DGX |
32+ GB disk space available |
For best performance, use the supplied power adapter with the DGX Spark system. |
Isaac ROS Environment#
To simplify development, we strongly recommend leveraging the Isaac ROS CLI by following these steps. This streamlines your development environment setup with the correct versions of dependencies on all supported platforms.
Note
All Isaac ROS Quickstarts, tutorials, and examples have been designed with the Isaac ROS CLI-managed environment as a prerequisite.
Customize your Dev Environment#
To customize your development environment, refer to this guide.
Updates#
Date |
Changes |
|---|---|
2026-04-30 |
Compatibility and integration updates for the Isaac ROS 4.4.0 release |
2026-03-23 |
Introduced early-stage support for SIPL camera framework and LI Eagle stereo CoE/HSB camera with ROS |
2026-02-19 |
Support for DGX Spark and JetPack 7.1 |
2026-02-02 |
Support for two new Docker-optional development and deployment modes |
2025-10-24 |
Support for ROS 2 Jazzy with VPI 4.0 |
2024-12-10 |
Added new alpha blending node |
2024-09-26 |
Update for ZED compatibility |
2024-05-30 |
Update to be compatible with JetPack 6.0 |
2023-10-18 |
Introduced confidence thresholding for SGM |
2023-05-25 |
Improved stereo rectification |
2023-04-05 |
Source available GXF extensions |
2022-10-19 |
Updated OSS licensing |
2022-08-31 |
Image flip support and update to be compatible with JetPack 5.0.2 |
2022-06-30 |
Migrated to NITROS based implementation |
2021-10-20 |
Migrated to NVIDIA-ISAAC-ROS. Fixed handling of extrinsics in Rectify and Disparity nodes. |
2021-08-11 |
Initial release to NVIDIA-AI-IOT |