Isaac ROS ZED Setup
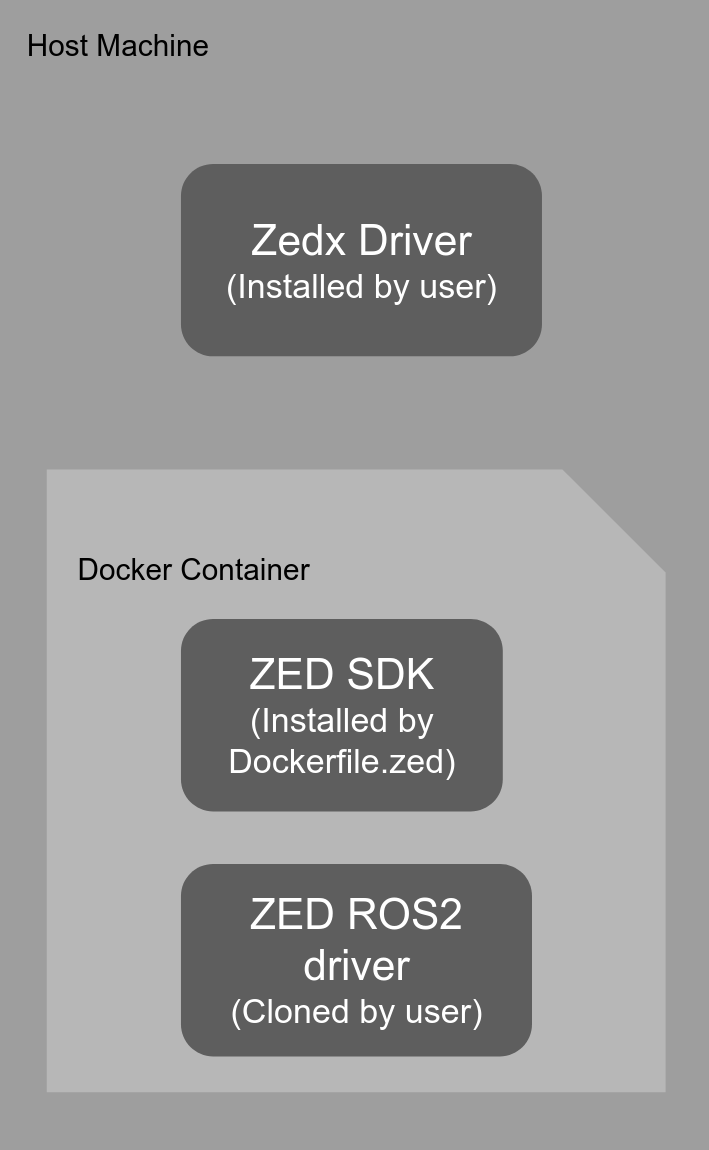
ZED cameras require the following to be able to publish data to ROS 2 topics:
ZED SDK (Step 5 of Setup Instructions)
zed-ros2-wrapper(Cloned in Step 1 of Setup Instructions)ZED X driver (Installed by user on host machine in Step 3 of Setup Instructions)
Camera Compatibility
All cameras supported by the zed ros2 wrapper work with Isaac ROS.
ZED Model |
SQA Testing? |
|---|---|
ZED 2i |
✓ |
ZED X |
✓ |
ZED 2 |
✗ |
ZED |
✗ |
ZED Mini |
✗ |
ZED X Mini |
✗ |
Setup Instructions
Note
This tutorial assumes that you have set up your development environment by following the instructions here.
Clone the
zed-ros2-wrapperrepository on themasterbranch:
cd ${ISAAC_ROS_WS}/src && \ git clone --recurse-submodules https://github.com/stereolabs/zed-ros2-wrapper -b humble-v4.2.5
If you are using ZED X or ZED X Mini refer to the appropriate stereolabs setup guide.
Note
You do not need to install the
ZED SDKbecause this is done in Step 5 of Setup Instructions.Note
You must install the
ZED driver.
Plug in the USB cable of your ZED camera before launching the Docker container in the next step.
Launch the Docker container.
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \ ./scripts/run_dev.sh
Install the
ZED SDK.
Note
Use
install-zed-x86_64.shbelow if you are running on X86.sudo chmod +x ${ISAAC_ROS_WS}/src/isaac_ros_common/docker/scripts/install-zed-aarch64.sh && \ ${ISAAC_ROS_WS}/src/isaac_ros_common/docker/scripts/install-zed-aarch64.sh
Install the dependencies for the
zed_wrapperpackage and build it:
cd ${ISAAC_ROS_WS} && \ sudo apt update && \ rosdep update && rosdep install --from-paths src/zed-ros2-wrapper --ignore-src -r -y && \ colcon build --symlink-install --packages-up-to zed_wrapper
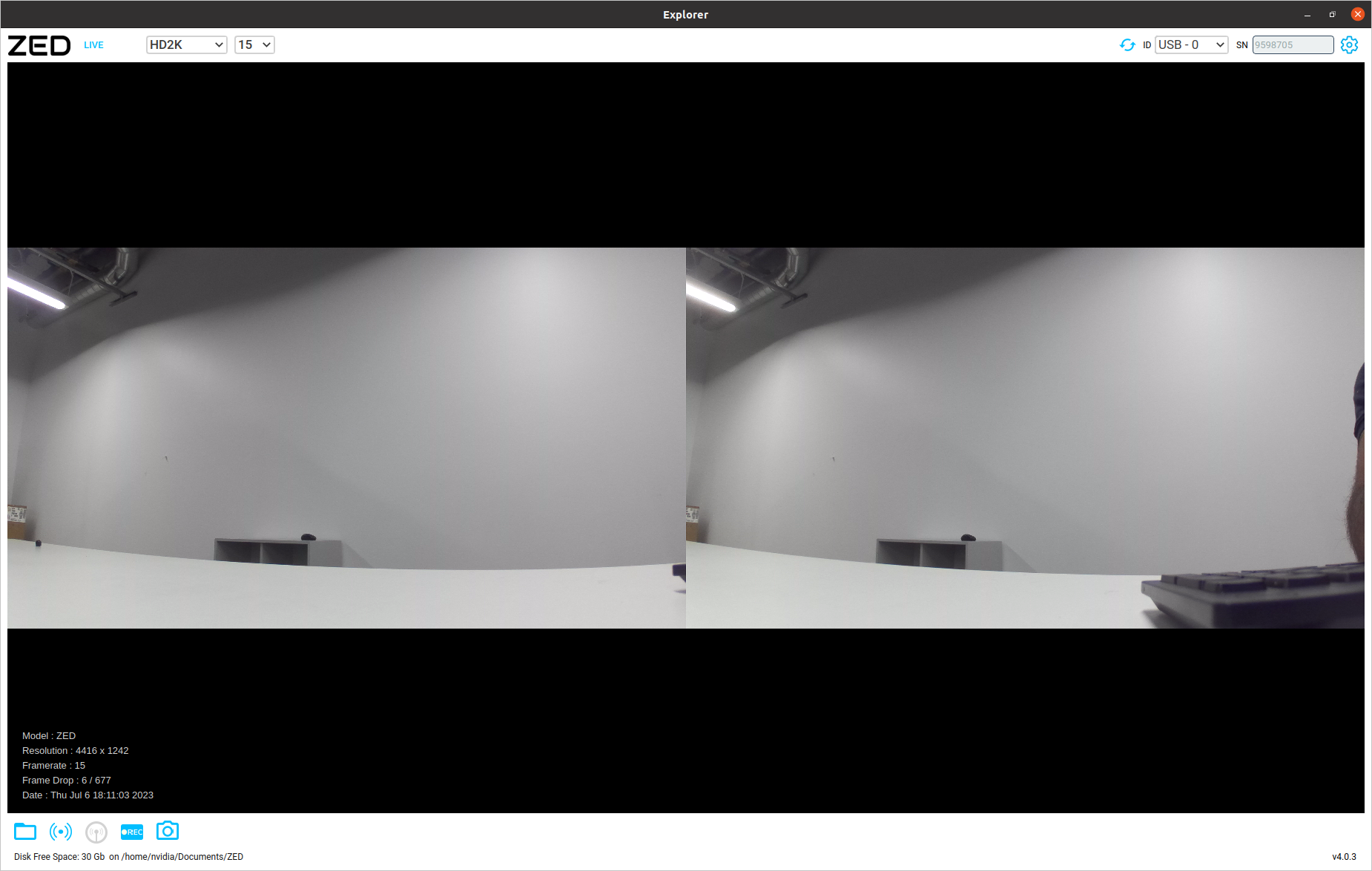
After the container image is rebuilt and you are inside the container, you can run
/usr/local/zed/tools/ZED_Explorerto check that the ZED camera is connected.
/usr/local/zed/tools/ZED_ExplorerIf everything is working as expected, you should see something similar to the following: