3. Sensors Architecture: Reach Forklift
3.1. Introduction
Sensors Architecture Description
The sensor architecture adopts a modular approach to accommodate diverse use cases. In this configuration designed for forklifts, front stereo cameras primarily support robust VSLAM and 3D obstacle mapping, while mono cameras facilitate teleoperation and sensor-to-sensor calibration.
This setup comprises of two stereo and three mono cameras. Rear mono cameras can potentially assist teleoperation at elevated heights alongside the fork-tines assembly. Additionally, the back stereo camera offers the option for the load dimension measurement.
Acronym |
Camera Designation |
|---|---|
FS |
Front stereo |
FCS |
Front ceiling-facing stereo |
FC |
Front camera |
BS |
Back stereo |
BRC |
Back-right camera |
BLC |
Back-left camera |
3.2. Stereo Cameras Coverage and Mounting Requirements
3.2.1. Front Coverage Requirements
Req ID: |
Ground Visibility |
27366490 |
Stereo camera(s) arrangement shall be able to see ground plane from a distance of < 1m from the foremost forklift surface across the forklift width. 
|
Req ID: |
Elevated Obstacles Visibility |
27366581 |
Stereo camera(s) arrangement shall be able to see an elevated obstacle at any height above the ground and below the forklift height at distance < 1m from the foremost forklift surface, across the forklift width. 
|
Req ID: |
Horizontal Coverage Angle |
27366552 |
Stereo camera(s) arrangement shall see a horizontal angle of > 1100 in any plane above the ground and below the forklift height. 
|
3.2.2. Back Coverage Requirements
Req ID: |
Ground Visibility |
27397857 |
Stereo camera(s) arrangement shall be able to see the ground plane from a distance < 1m from the back-most forklift surface (excluding the tines) across the forklift width. 
|
Req ID: |
Payload Visibility |
27397862 |
The stereo cameras(s) arrangement shall provide full visibility of the payload footprint when the forklift tines are elevated to a height of Z~0.5m above the camera level. 

|
3.2.2.1. Mounting Requirements
Req ID: |
Pitch Range |
27386985 |
Any stereo camera pitch angle shall be in the range between -5 and 55 degrees. |
Req ID: |
Z-range |
27386997 |
Any stereo camera vertex Z shall be < 0.5m in height. |
3.3. Mono Cameras Coverage Requirements
3.3.1. Front Coverage Requirement
Req ID: |
Ground Visibility |
27430368 |
Camera(s) arrangement shall be able to see the ground plane from a distance < 0.2m from the foremost forklift surface across the forklift width. 
|
Req ID: |
Teleoperation Requirements |
27430377 |
Camera(s) arrangement shall be able to provide visual data sufficient for safe teleoperation of the AMR when driving forward. |
3.3.2. Back/Sides Coverage Requirements
Req ID: |
Tines Coverage Requirements |
27430404 |
Camera(s) arrangement shall provide coverage of the tines of the forklift at any supported loading height. 
|
Req ID: |
Teleoperation Requirements |
27430405 |
Camera(s) arrangement shall provide visual data sufficient for safe teleoperation of the AMR when driving backwards, in loaded and unloaded conditions. Camera(s) arrangement shall provide visual data sufficient for safe teleoperation of the AMR when loading and unloading payload. Camera(s) arrangement shall provide visual data sufficient for safe teleoperation of the AMR when the loading/unloading procedure is handled at elevated height. |
3.3.3. Mounting Requirements
Req ID: |
Pitch Range |
27430410 |
Any camera pitch angle shall be in the range between -25 and 5 degrees. |
Req ID: |
Z-range |
27430411 |
Any camera vertex Z shall be < 0.5m in height when the tines are lowered. |
Req ID: |
Back Cameras Special Mounting Requirements |
27430423 |
To facilitate teleoperation at an elevated height, the back-facing cameras shall be rigidly connected to the lifting part of the forklift so that the coverage requirements are fulfilled when operating the load at the elevated height. |
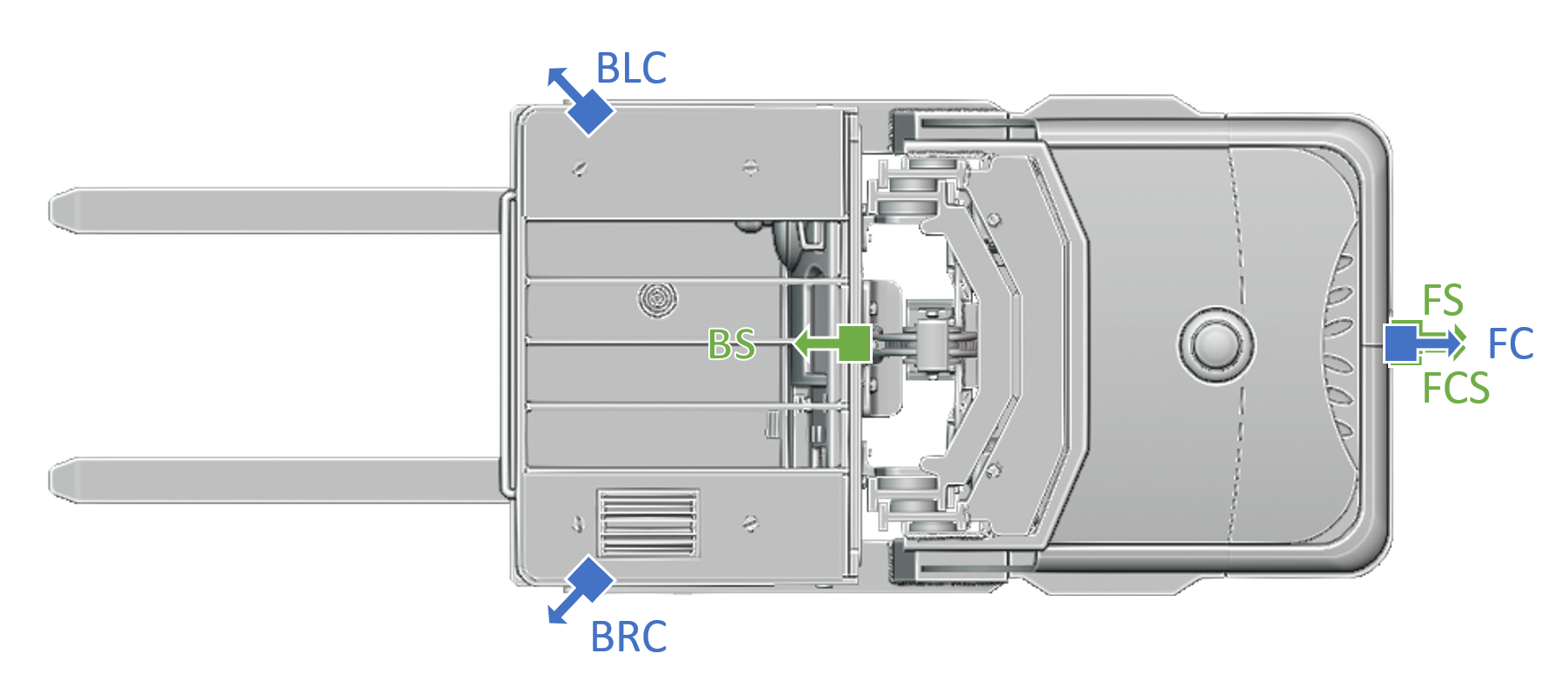
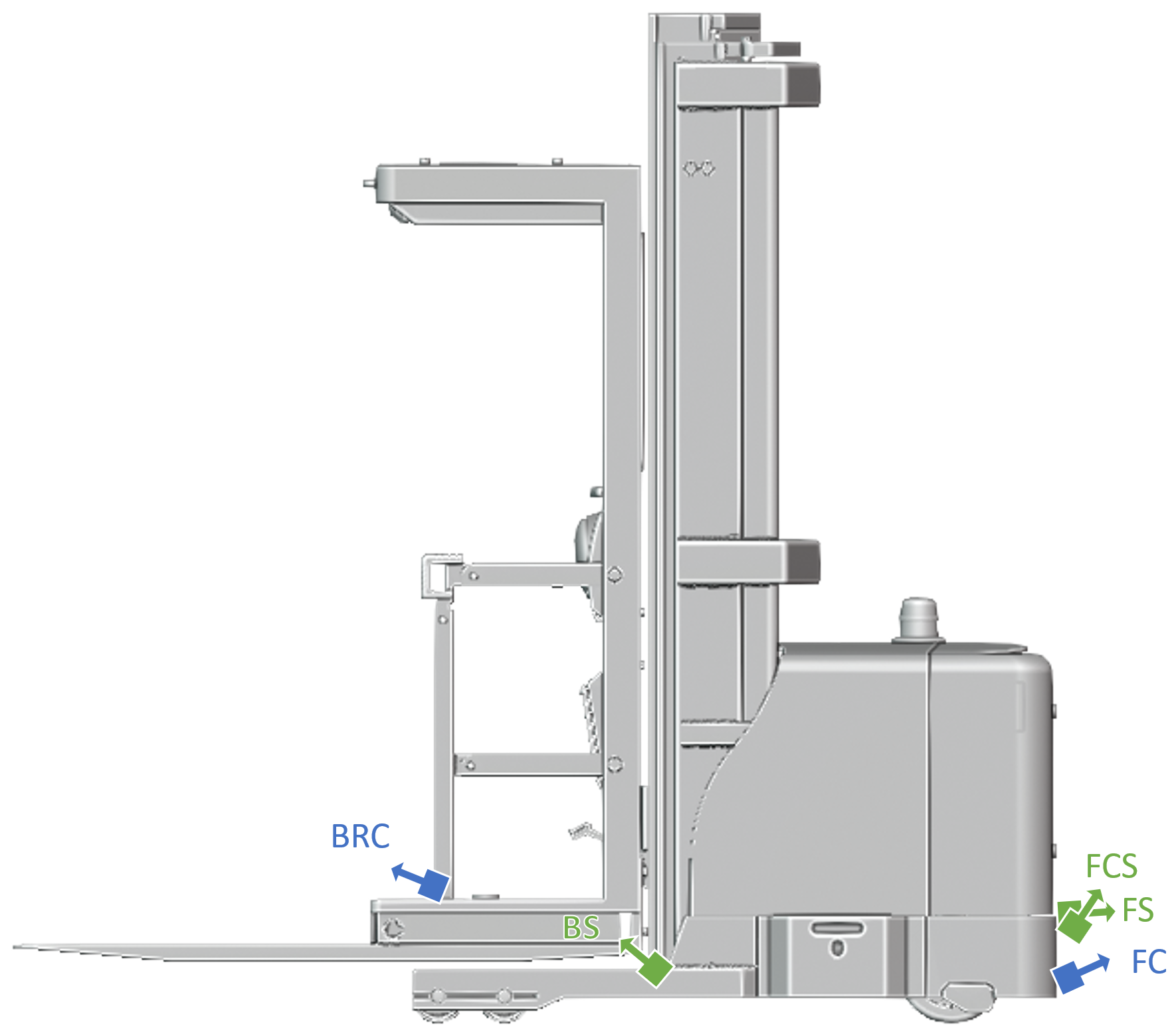
Sensors Mounting Example
Below is an implementation example for the camera belt.
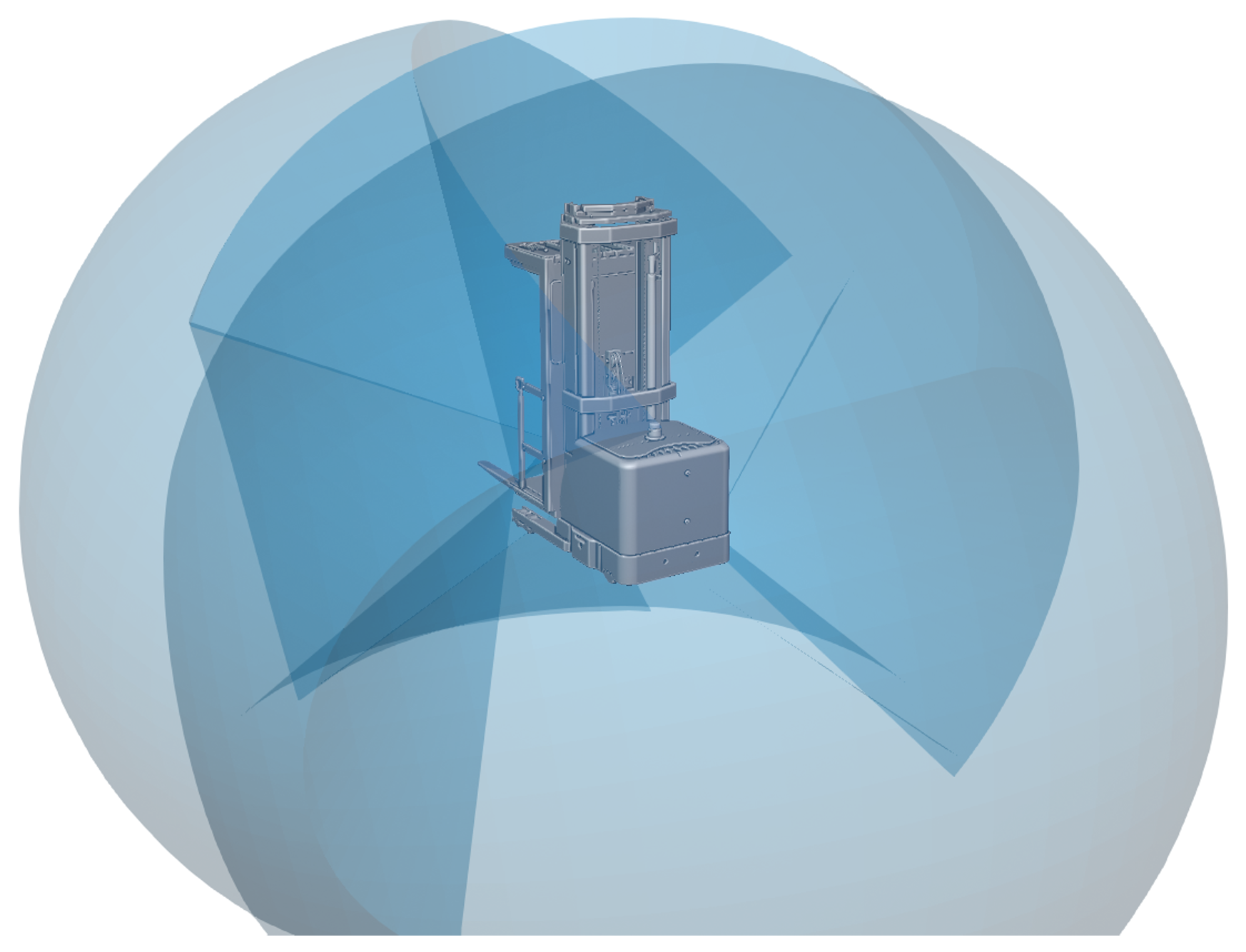
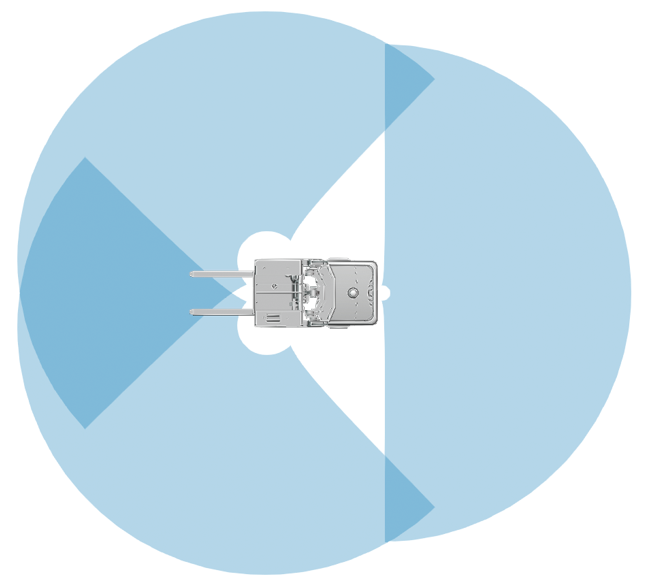
The stereo cameras’ coverage is depicted in the image below:
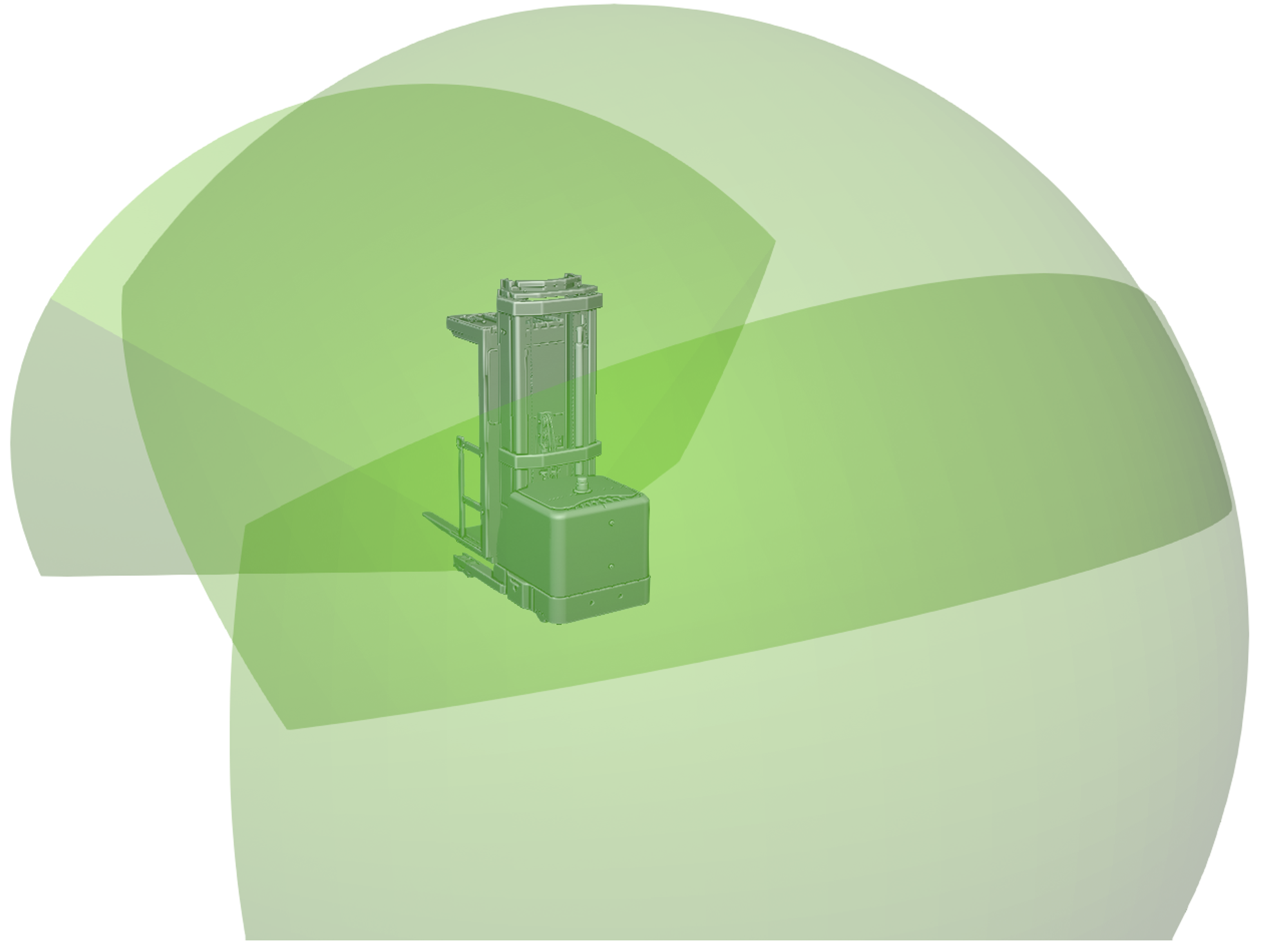
The sensors mounting locations and angles are summarized in the following table:
X [m] |
Y [m] |
Z [m] |
Pitch [deg] |
Yaw [deg] |
Roll [deg] |
|
FS |
0.05 |
0.075 |
0.32 |
-5 |
0 |
0 |
FCS |
0.05 |
0.075 |
0.24 |
-55 |
0 |
0 |
BS |
-1.2 |
-0.075 |
0.1 |
-30 |
180 |
0 |
Note
Hawk vertex, aligned with the left lens center, was chosen for representation of Hawk locations. Please refer to Hawk datasheet for more information.
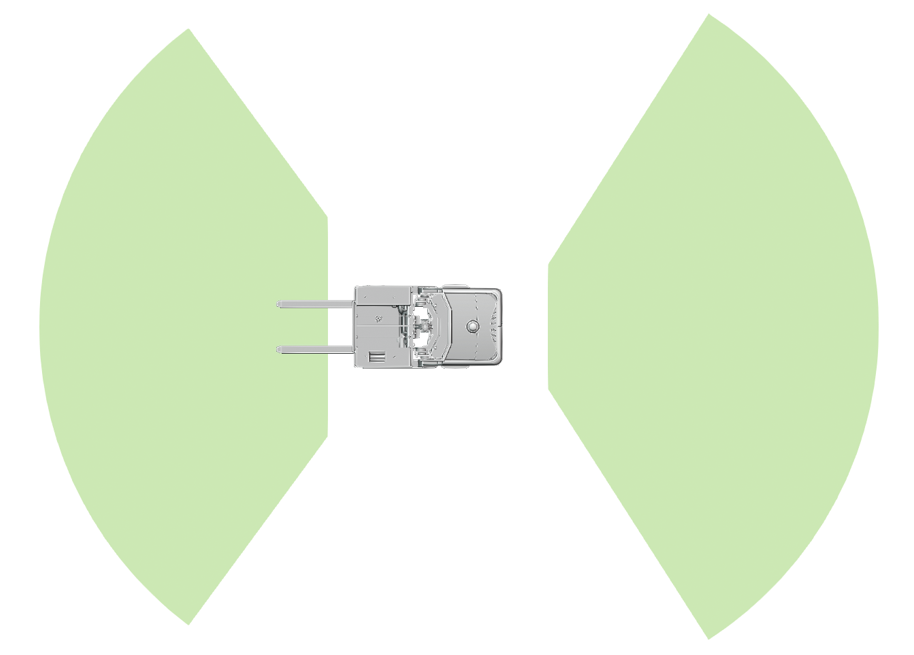
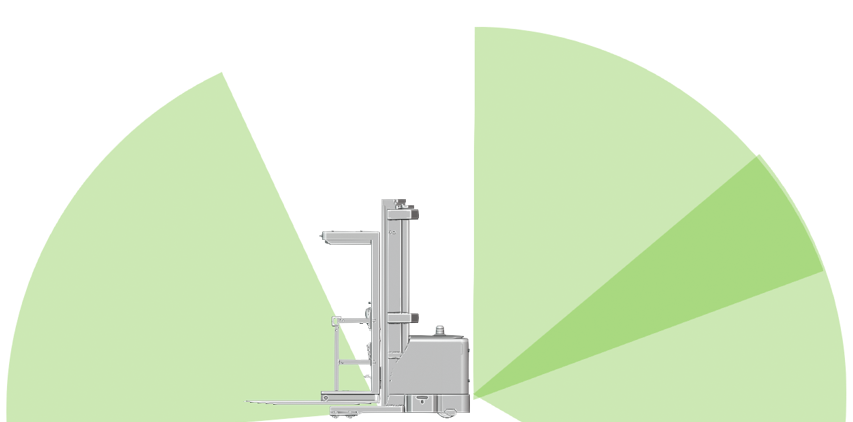
The mono cameras’ coverage is depicted in the image below:
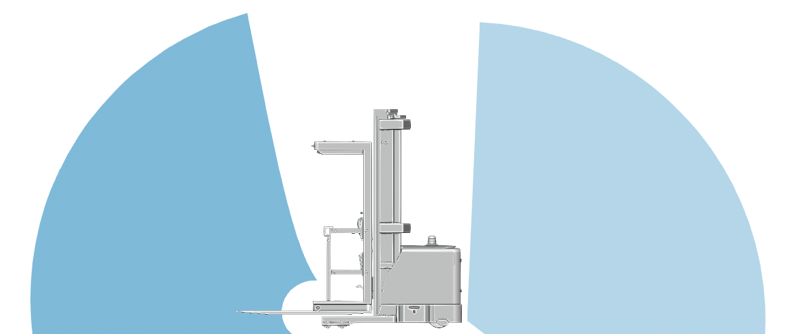
The sensors mounting locations and angles are summarized in the following table:
X [m] |
Y [m] |
Z [m] |
Pitch [deg] |
Yaw [deg] |
Roll [deg] |
|
FC |
0.075 |
0 |
0.1 |
-10 |
0 |
0 |
BLC |
-1.81 |
0.55 |
0.4 |
-20 |
135 |
0 |
BRC |
-1.81 |
-0.55 |
0.4 |
-20 |
-135 |
0 |
For reference, the AMR used in this example is shown on a 10cm x 10cm grid: