Tutorial for AprilTag Detection with Isaac Sim#
Overview#
This tutorial walks you through a graph to estimate the 6DOF pose of AprilTags using images from Isaac Sim.
Tutorial Walkthrough#
Complete the quickstart here.
Activate the Isaac ROS environment:
isaac-ros activateLaunch the pre-composed graph launch file:
ros2 launch isaac_ros_apriltag isaac_ros_apriltag_isaac_sim_pipeline.launch.py
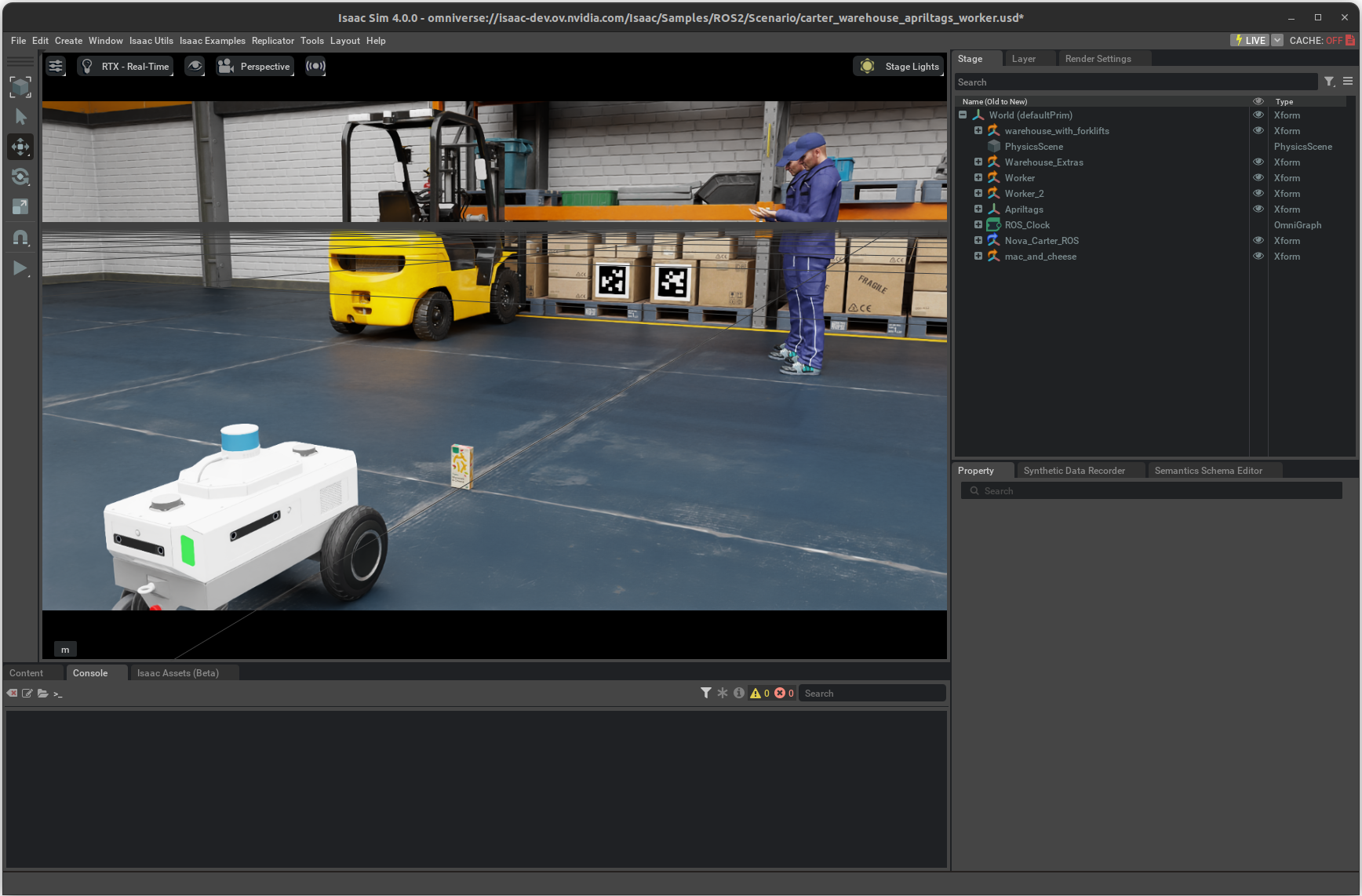
Install and launch Isaac Sim following the steps in the Isaac ROS Isaac Sim Setup Guide
Press Play to start publishing data from the Isaac Sim.
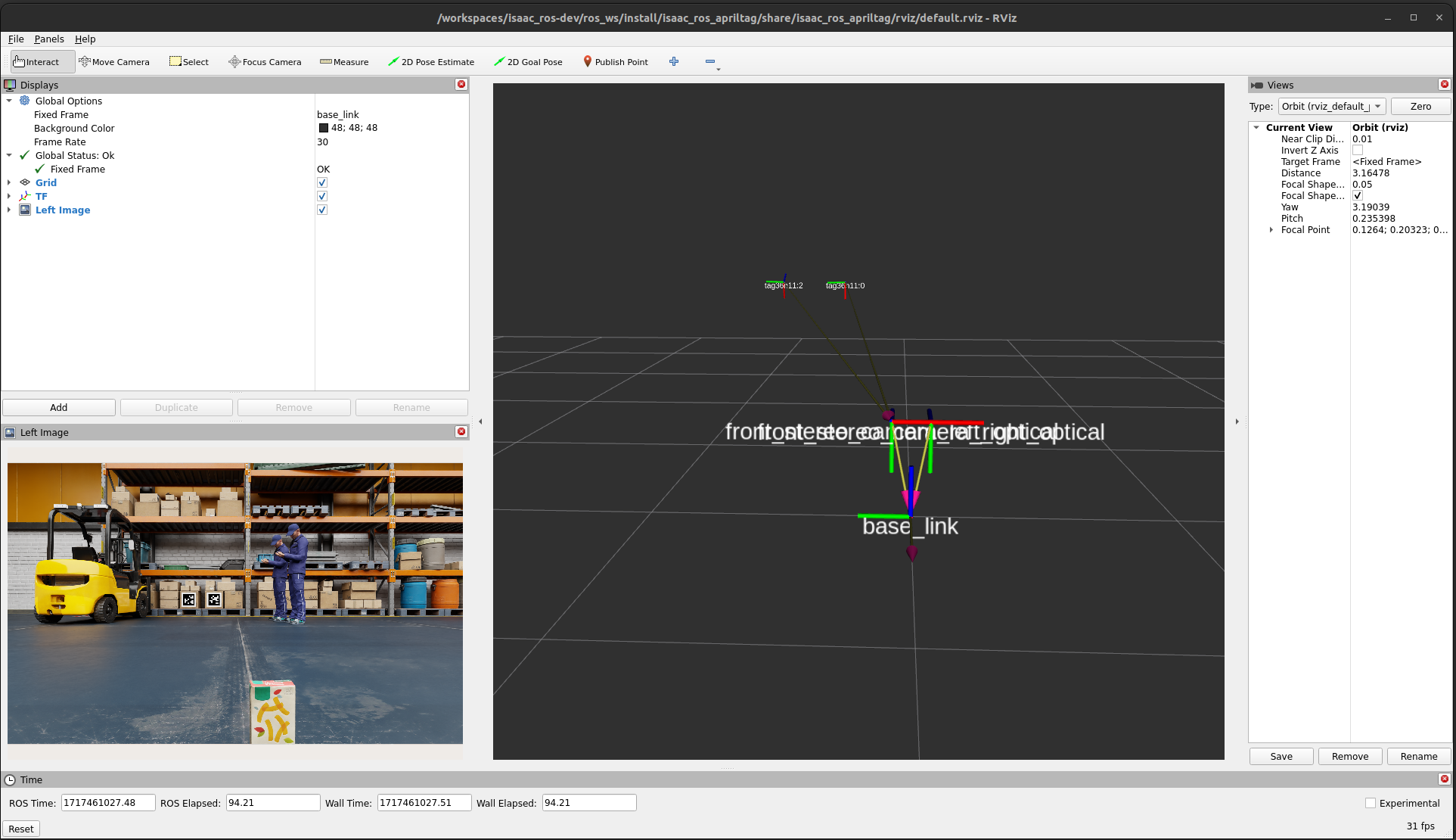
In a separate terminal, install and run RViz to visualize the AprilTag detections:
sudo apt-get install -y ros-jazzy-rviz2 source /opt/ros/jazzy/setup.bash
rviz2 -d $(ros2 pkg prefix isaac_ros_apriltag --share)/rviz/default.rviz
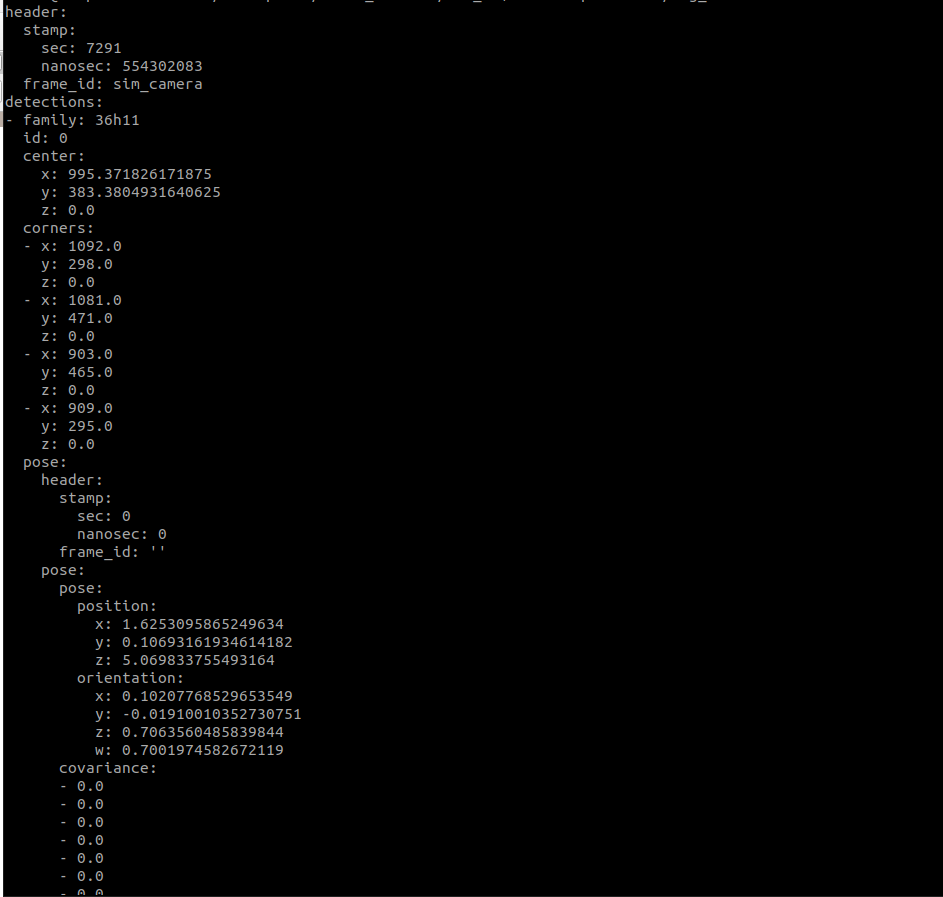
If you prefer to observe the AprilTag output in text form, echo the contents of the
/tag_detectionstopic with the following command in a separate terminal:ros2 topic echo /tag_detections