Instructions to Generate Disparity Maps for Stereo Images#
These are instructions for generating a disparity map for a given stereo image pair.
The isaac_ros_dnn_stereo_visualizer.py script supports:
rosbag input type
Raw input images
Camera info files
To generate a disparity estimation from raw inputs:
Complete the Quickstart guide.
Launch the ESS Disparity Node using one of the following options:
To run ESS at a threshold of 0.3 run:
ros2 launch isaac_ros_ess isaac_ros_ess.launch.py engine_file_path:=${ISAAC_ROS_WS}/isaac_ros_assets/models/dnn_stereo_disparity/dnn_stereo_disparity_v4.1.0_onnx_trt10.13/ess.engine ess_plugin_file_path:=${ISAAC_ROS_WS}/isaac_ros_assets/models/dnn_stereo_disparity/dnn_stereo_disparity_v4.1.0_onnx_trt10.13/plugins/$(uname -m)/ess_plugins.so threshold:=0.3
To run ESS at a threshold of 0.0 run:
ros2 launch isaac_ros_ess isaac_ros_ess.launch.py engine_file_path:=${ISAAC_ROS_WS}/isaac_ros_assets/models/dnn_stereo_disparity/dnn_stereo_disparity_v4.1.0_onnx_trt10.13/ess.engine ess_plugin_file_path:=${ISAAC_ROS_WS}/isaac_ros_assets/models/dnn_stereo_disparity/dnn_stereo_disparity_v4.1.0_onnx_trt10.13/plugins/$(uname -m)/ess_plugins.so threshold:=0.0
Visualize and validate the output of the package:
ros2 run isaac_ros_dnn_stereo_decoder isaac_ros_dnn_stereo_visualizer.py --raw_inputs
With threshold set to 0.4, you should see:
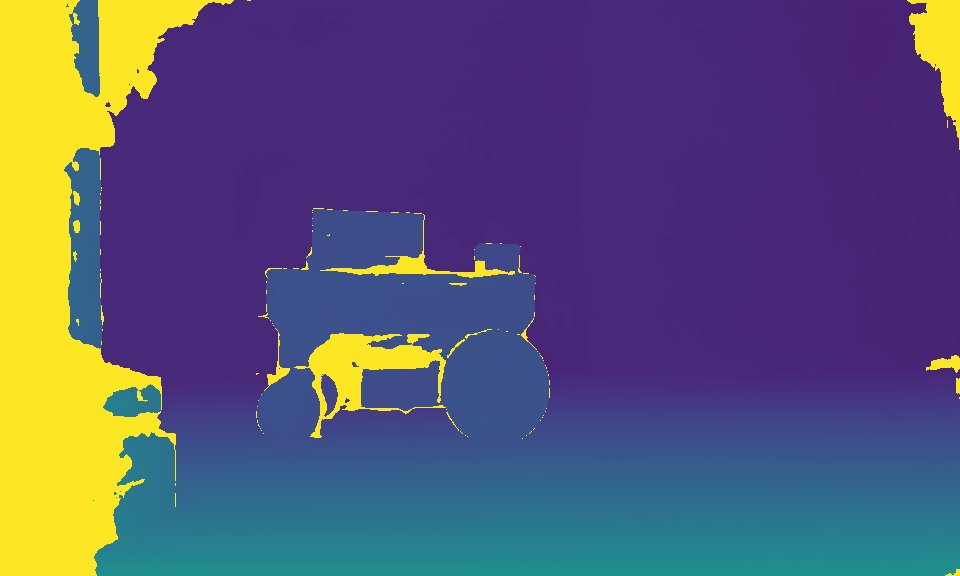
With threshold set to 0.0, you should see:

Try your own examples:
ros2 run isaac_ros_dnn_stereo_decoder isaac_ros_dnn_stereo_visualizer.py --raw_inputs \ --left_image_path '<Absolute path to your left image>' \ --right_image_path '<Absolute path to your right image>' \ --camera_info_path '<Absolute path your camera info json file>'