Technical Details#
Mapping Modes#
Nvblox supports different mapping modes.
Static Reconstruction#
Nvblox builds a reconstructed map in the form of a TSDF (Truncated Signed Distance Function) stored in a 3D voxel grid. This approach is similar to 3D occupancy grid mapping approaches in which occupancy probabilities are stored at each voxel. However, TSDF-based approaches like nvblox store the (signed) distance to the closest surface at each voxel. The surface of the environment can then be extracted as the zero-level set of this voxelized function. Typically, TSDF-based reconstructions provide higher quality surface reconstructions.
Distance fields are useful for path planning. They provide an immediate means of checking potential future robot positions for collisions with the reconstructed environment. nvblox provides for construction of the full (non-truncated) distance field, also known as the ESDF (Euclidean Signed Distance Function).
The dual utility of distance functions for reconstruction and planning motivates their use in nvblox.
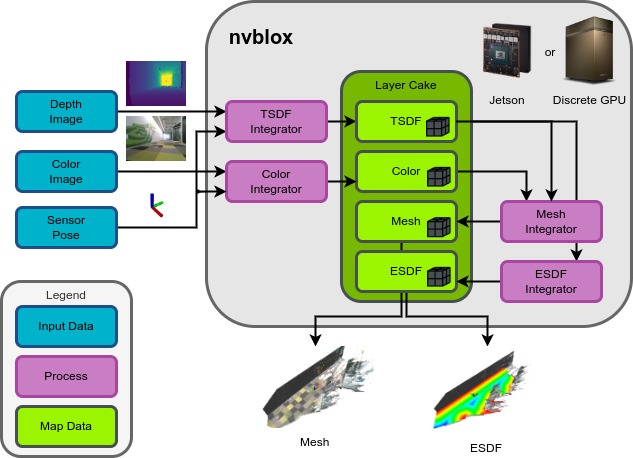
The diagram above indicates data and processes in nvblox. By default, nvblox builds TSDF, color, mesh, and ESDF layers. Each layer is an independent, but aligned and co-located, voxel grid containing data of the appropriate type. For example, voxels on the TSDF layer store distance and weight data, while the color layer voxels store color values.
People Reconstruction#
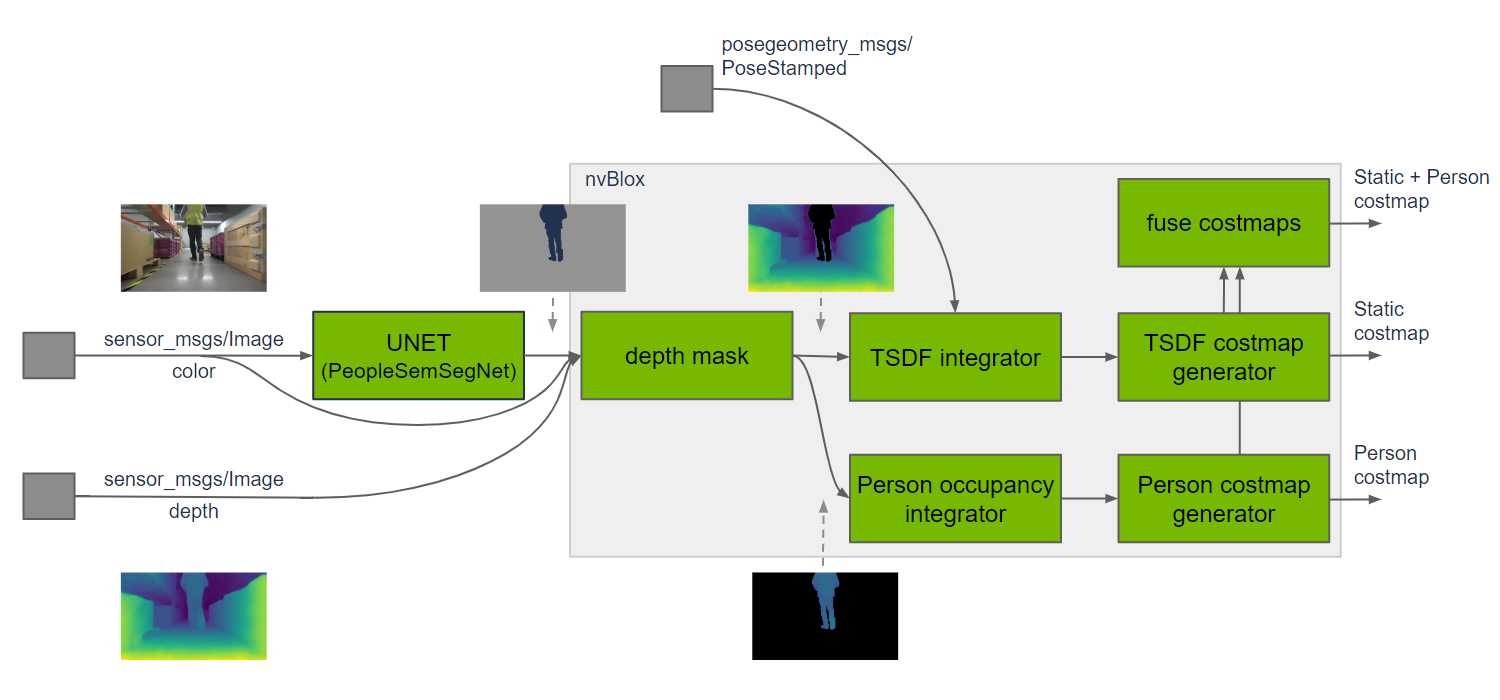
There are additional options for mapping scenes containing people (that is, people_segmentation, people_detection). Under these configurations, people are separated from the TSDF reconstruction into a separate layer containing an occupancy grid representing reconstructed people.
People segmentation is applied to each processed color frame with Isaac ROS Image Segmentation. People detection is applied to each processed color frame with Isaac ROS Object Detection. The detected bounding boxes are converted to segmentation masks by masking all pixels withing boxes for performance consideration.
The depth masker module uses the segmentation mask from the color image to separate the depth-map into people and non-people parts. While the non-people labeled part of the depth frame is still forwarded to TSDF mapping, the people labeled part is processed to an occupancy grid map.
To relax the assumption that occupancy grid maps only capture static
objects, an occupancy decay step must be applied. At a fixed frequency, all
voxel occupancy probabilities are decayed towards 0.5 over time.
This means that the state of the map (occupied or free) becomes less
certain after it has fallen out of the field of view, until it becomes
unknown (0.5 occupancy probability).
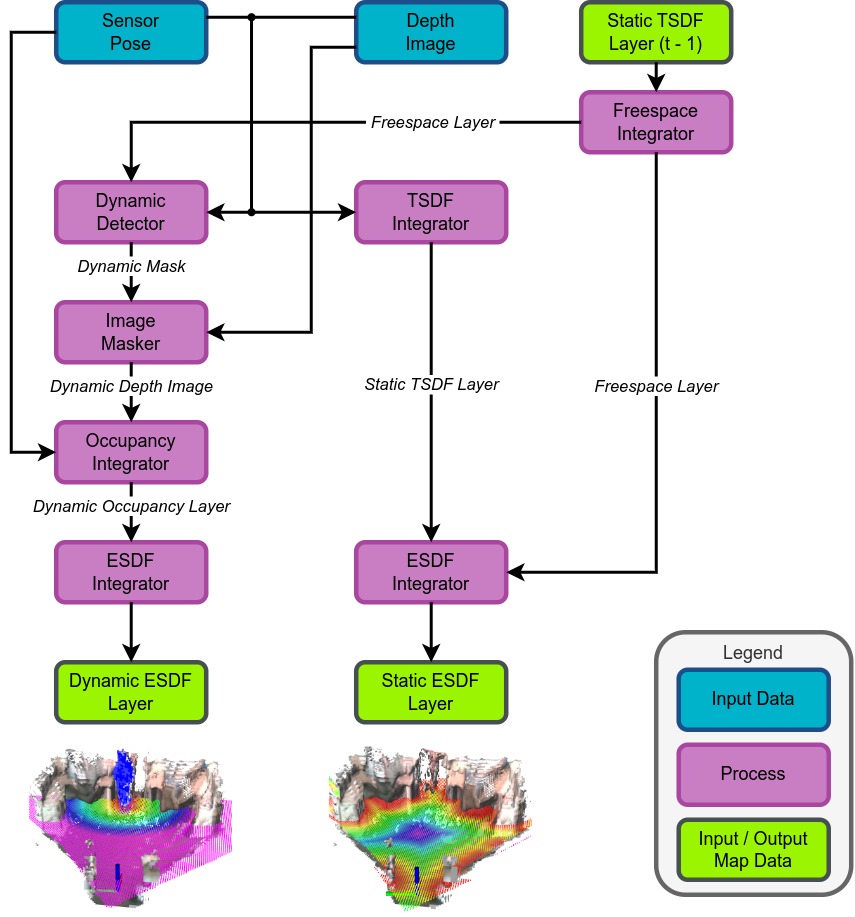
Dynamic Reconstruction#
The algorithm used for nvblox dynamic reconstruction is based on the following paper:
While the people reconstruction pipeline employs a Deep Neural Network (DNN) to generate a mask image for separating people detections into a dynamic occupancy layer, the general dynamic reconstruction pipeline maintains a (high-confidence) freespace layer dedicated to detecting dynamic objects. Whenever an object enters freespace, it is identified as dynamic and then integrated into the dynamic occupancy layer, similar to the people reconstruction pipeline described above. This enables the pipeline to separately reconstruct people (or other specific objects that the DNN was trained for) and all moving objects regardless of their class or category.
Note
Dynamic reconstruction requires accurate pose estimation. Objects moving slower than the odometry drift can’t be detected as dynamic.
Using RealSense Camera Streams for both Nvblox and Visual SLAM#
In the examples, we used the RealSense cameras’s dual IR streams for Visual SLAM and depth and color streams for Nvblox. The setup is shown below.
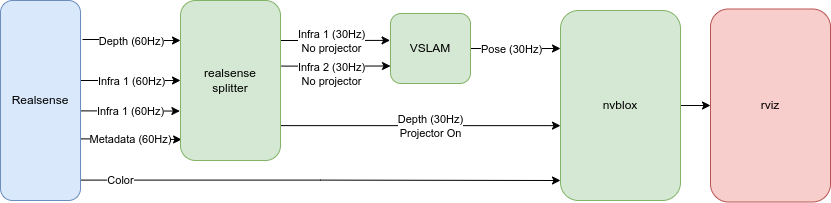
Images (2 x IR images and 1 x Depth image) are published at 60Hz from the RealSense ROS 2 node.
The RealSense D400 series uses an inbuilt optical projector to achieve active stereo vision for improved depth quality. However, the emitted pattern visible on the stereo IR images disrupts VSLAM performance. To achieve both, improved depth quality and reliable VSLAM tracking, we configure the emitter to toggle between interleaved frames (AKA emitter_on_off mode).
RealSense splitter: The RealSense splitter node is part of
Isaac ROS Nvbloxand filters the incoming RealSense image streams depending on the emitter state at image capture. Only infra images with the emitter off are forwarded to VSLAM and only depth images with emitter on tonvblox.