Tutorial for ESS with Isaac Sim#
Overview#
This tutorial walks you through a graph to estimate depth with stereo images from Isaac Sim.
Tutorial Walkthrough#
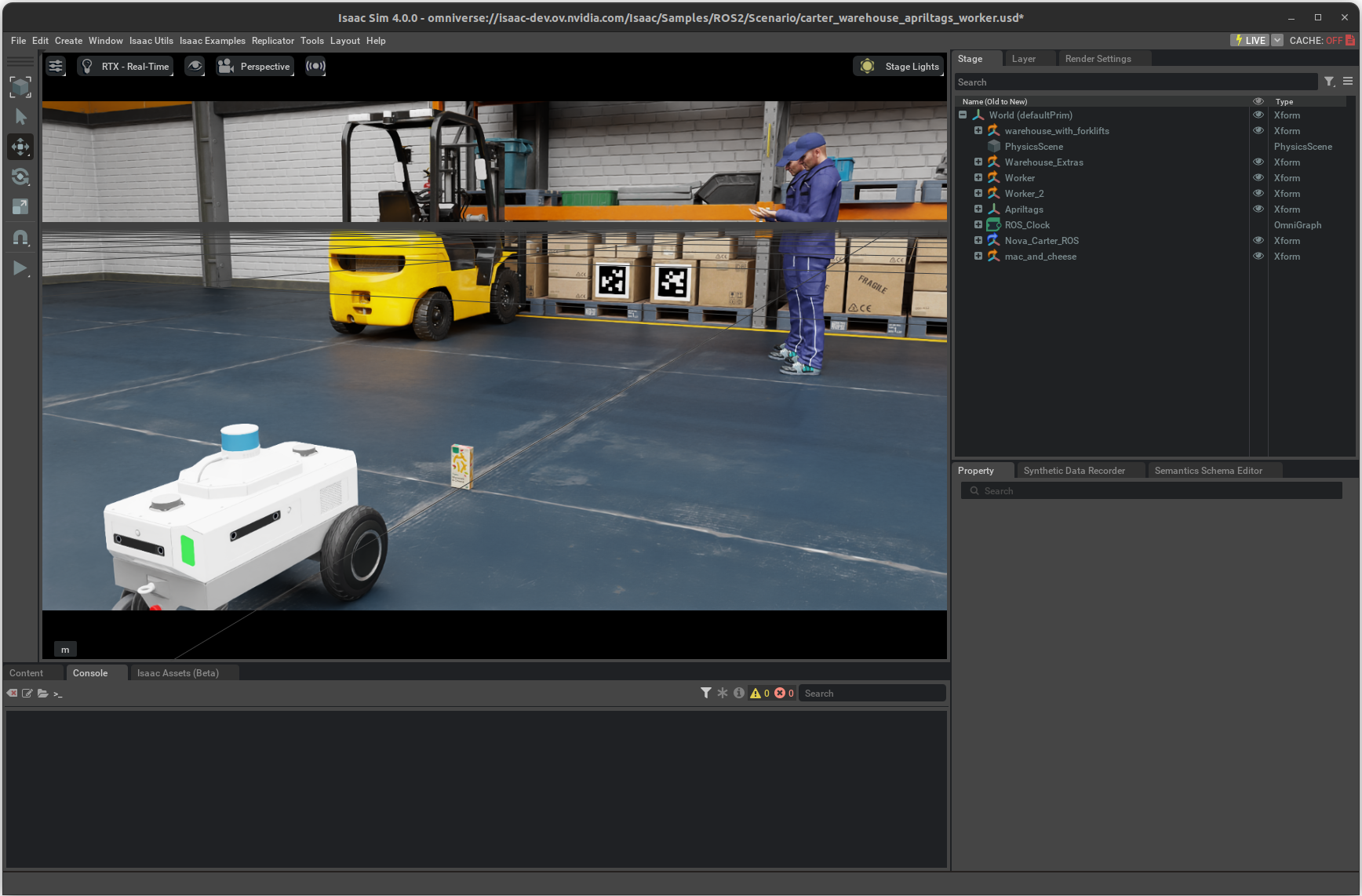
Install and launch Isaac Sim following the steps in the Isaac ROS Isaac Sim Setup Guide.
Press Play to start publishing data from the Isaac Sim.
Complete the
isaac_ros_essquickstart.
Note
Use the ess model and not the ess_light model for the quickstart.
Open a new terminal and attach to the container:
isaac-ros activateInstall
rviz2(required for the launch file visualization):sudo apt-get install -y ros-jazzy-rviz2
Source the setup file.
source /opt/ros/jazzy/setup.bash
In the terminal, start the
isaac_ros_essnode using the launch files:ros2 launch isaac_ros_ess isaac_ros_ess_isaac_sim.launch.py \ engine_file_path:=${ISAAC_ROS_WS:?}/isaac_ros_assets/models/dnn_stereo_disparity/dnn_stereo_disparity_v4.1.0_onnx_trt10.13/ess.engine \ ess_plugin_file_path:=${ISAAC_ROS_WS:?}/isaac_ros_assets/models/dnn_stereo_disparity/dnn_stereo_disparity_v4.1.0_onnx_trt10.13/plugins/$(uname -m)/ess_plugins.so \ threshold:=0.4
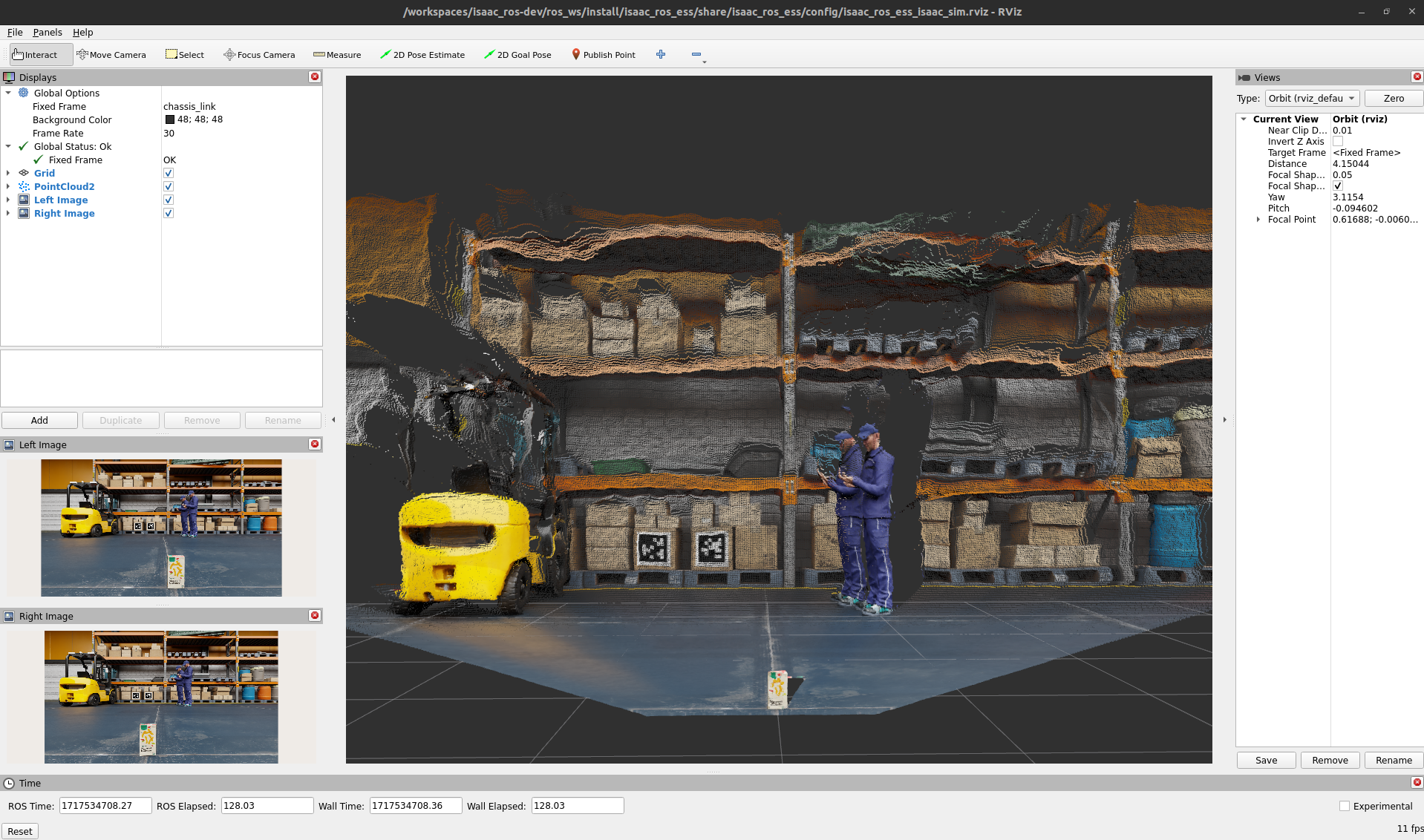
The launch file will automatically open RViz configured to display:
The 3D point cloud generated from the disparity output (
/points2)The left and right stereo camera images
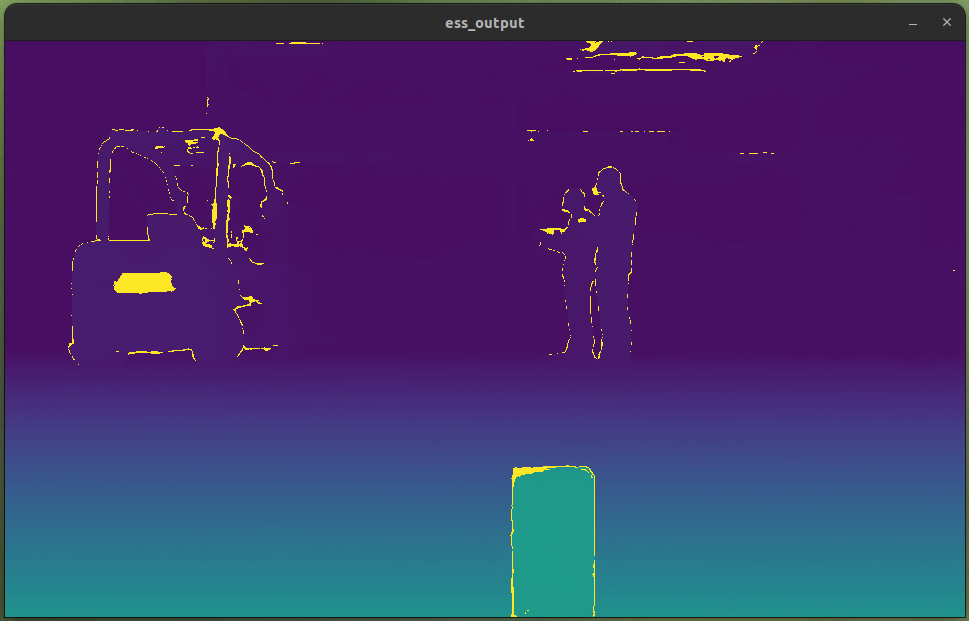
Optionally, you can run the visualizer script to visualize the disparity image.
ros2 run isaac_ros_dnn_stereo_decoder isaac_ros_dnn_stereo_visualizer.py