Tutorial for Occupancy Grid Localizer with Isaac Sim#
Overview#
This tutorial describes how to integrate the Isaac ROS Occupancy Grid Localizer with a simulated robot running in Isaac Sim with Nav2.
Tutorial Walkthrough#
Complete the quickstart here.
Activate the Isaac ROS environment:
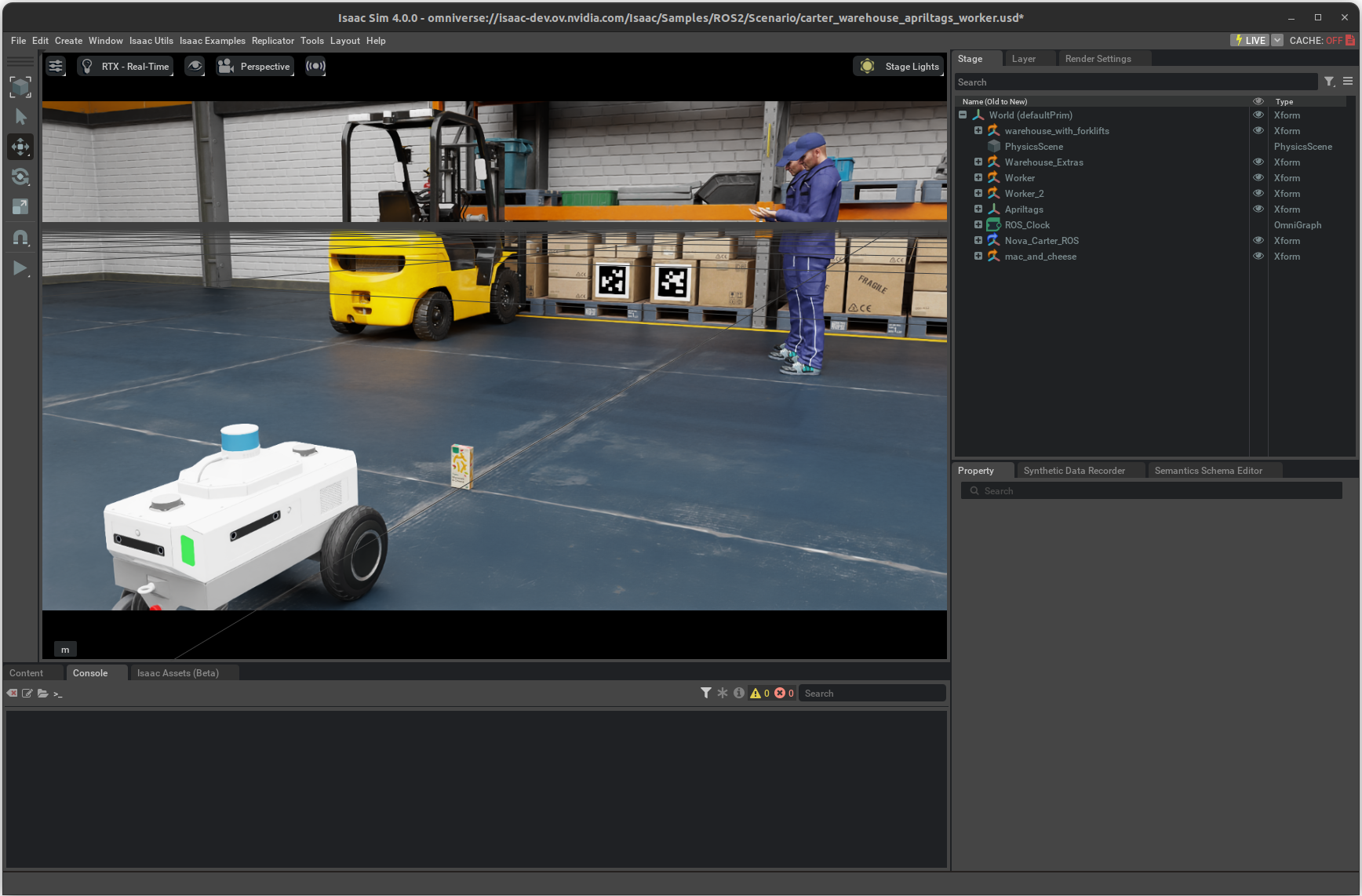
isaac-ros activateInstall and launch Isaac Sim following the steps in the Isaac ROS Isaac Sim Setup Guide.
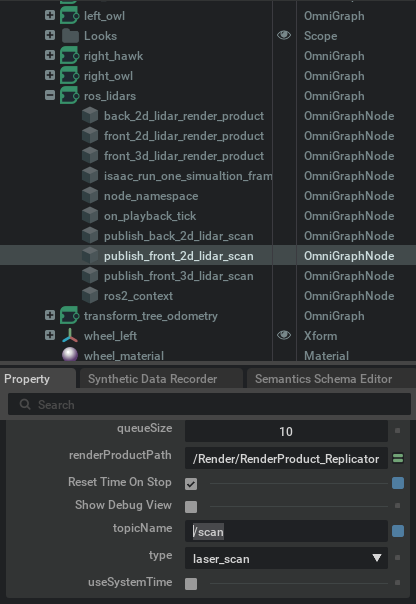
Select
/World/Nova_Carter_ROS/ros_lidars/publish_front_2d_lidar_scanin the Stage pane and change the topic name for front 2D lidar as follows:
Select
/World/Nova_Carter_ROS/ros_lidars/front_2d_lidar_render_productin the Stage pane and setenabledto True (checked).Press Play to start publishing data from the Isaac Sim.
Run the launch file and validate that a Nav2 window pops up.
ros2 launch isaac_ros_occupancy_grid_localizer isaac_ros_occupancy_grid_localizer_nav2.launch.py
Open a new terminal and activate the Isaac ROS environment:
isaac-ros activateTrigger the localization service using the command line interface:
ros2 service call /trigger_grid_search_localization std_srvs/srv/Empty {}
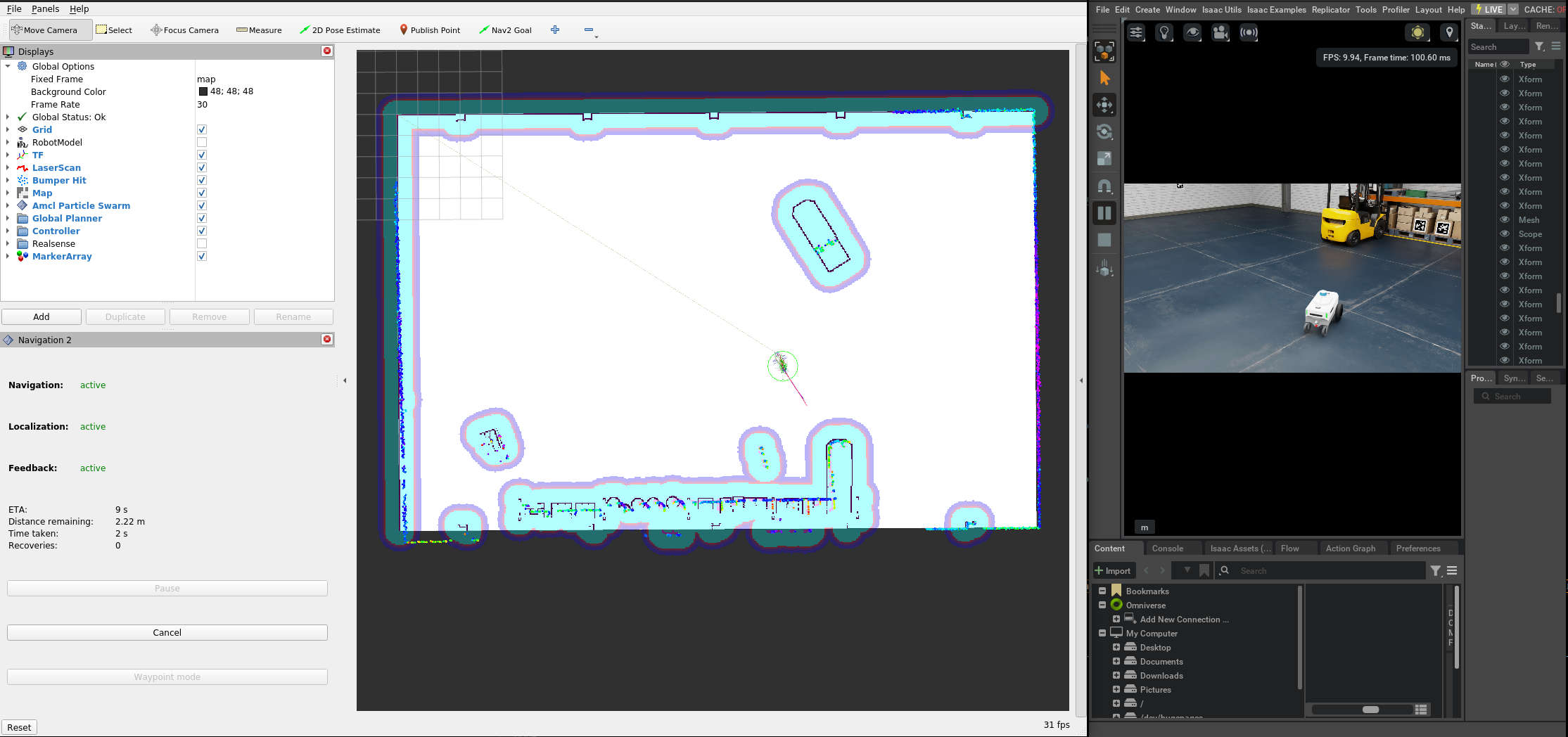
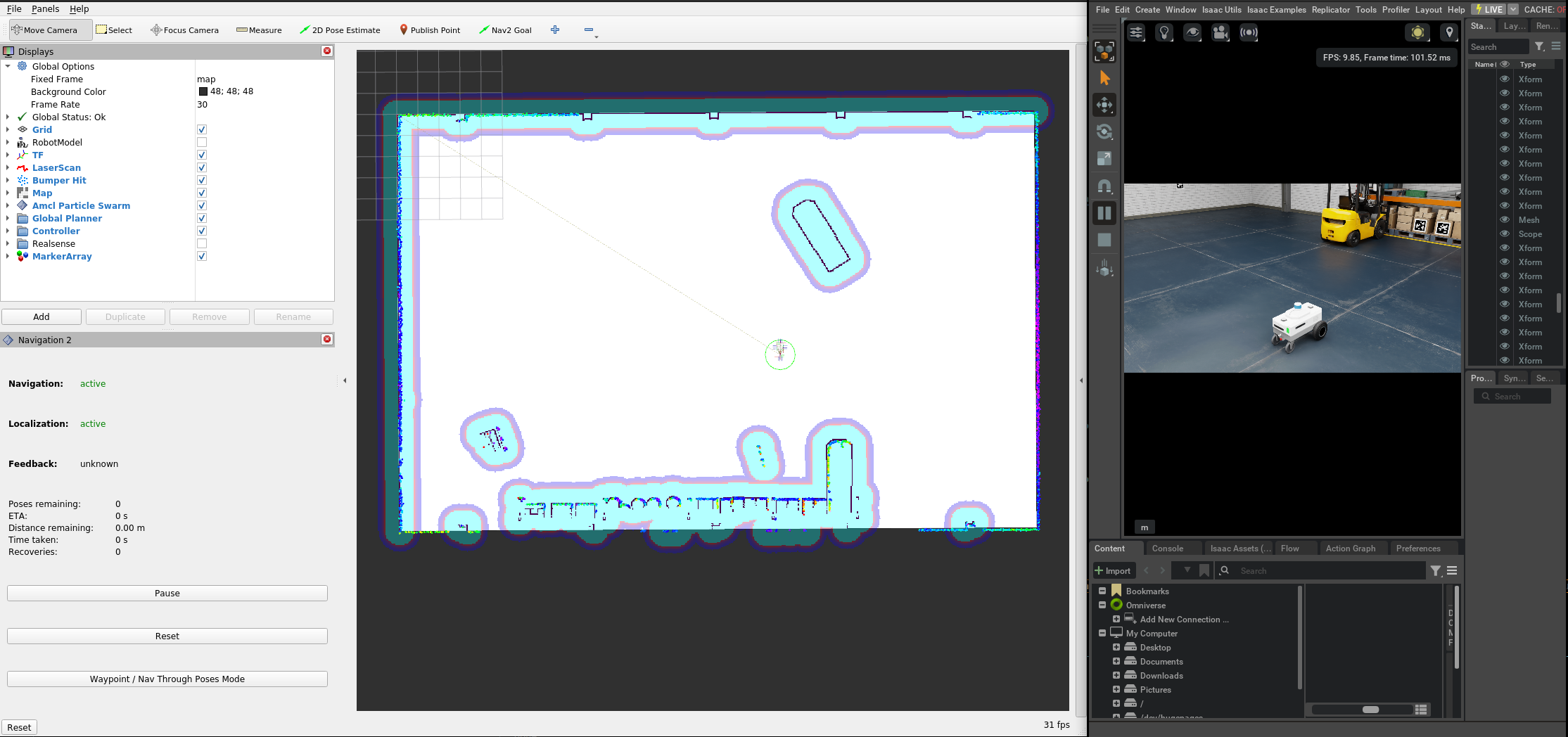
You should see the laser scan in RViz. This happens when the transform between map and front_2d_lidar frame is available. The robot is now localized. You can give a position setpoint using the
2D Nav Goalbutton as shown below. You can relocalize again at any point by running theros2 service callcommand.