Isaac ROS Object Detection#


Overview#
Isaac ROS Object Detection contains ROS 2 packages to perform object
detection.
isaac_ros_rtdetr, isaac_ros_detectnet, isaac_ros_yolov8, and isaac_ros_grounding_dino each provide a method for spatial
classification using bounding boxes with an input image. Classification
is performed by a GPU-accelerated model of the appropriate architecture:
isaac_ros_rtdetr: RT-DETR modelsisaac_ros_detectnet: DetectNet modelsisaac_ros_yolov8: YOLOv8 modelsisaac_ros_grounding_dino: Grounding DINO models
The output prediction can be used by perception functions to understand the presence and spatial location of an object in an image.
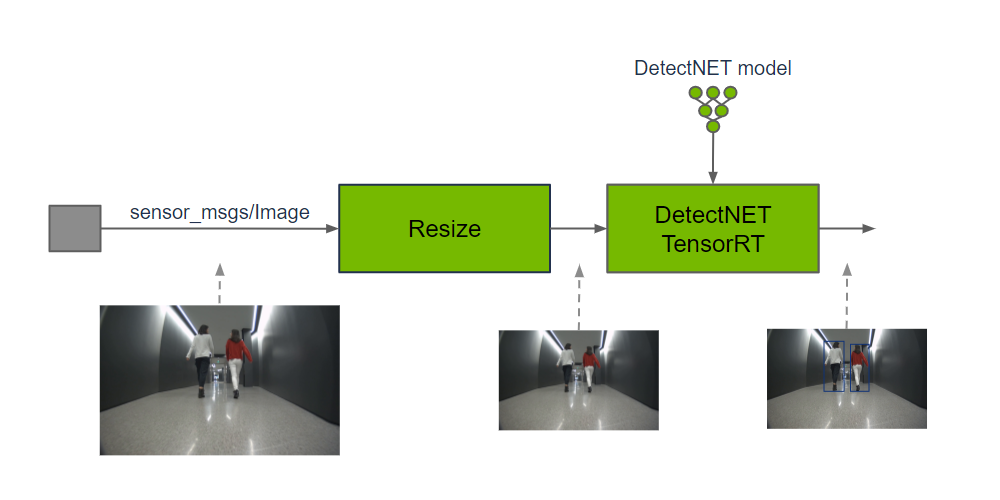
Each Isaac ROS Object Detection package is used in a graph of nodes to provide a bounding box detection array with object classes from an input image. A trained model of the appropriate architecture is required to produce the detection array.
Input images may need to be cropped and resized to maintain the aspect ratio and match the
input resolution of the specific object detection model; image resolution may be reduced to
improve DNN inference performance, which typically scales directly with
the number of pixels in the image. isaac_ros_dnn_image_encoder
provides DNN encoder utilities to process the input image into Tensors for the
object detection models.
Prediction results are decoded in model-specific ways,
often involving clustering and thresholding to group multiple detections
on the same object and reduce spurious detections.
Output is provided as a detection array with object classes.
DNNs have a minimum number of pixels that need to be visible on the object to provide a classification prediction. If a person cannot see the object in the image, it’s unlikely the DNN will. Reducing input resolution to reduce compute may reduce what is detected in the image. For example, a 1920x1080 image containing a distant person occupying 1k pixels (64x16) would have 0.25K pixels (32x8) when downscaled by 1/2 in both X and Y. The DNN may detect the person with the original input image, which provides 1K pixels for the person, and fail to detect the same person in the downscaled resolution, which only provides 0.25K pixels for the person.

Object detection classifies a rectangle of pixels as containing an object, whereas image segmentation provides more information and uses more compute to produce a classification per pixel. Object detection is used to know if, and where in a 2D image, the object exists. If a 3D spacial understanding or size of an object in pixels is required, use image segmentation.
Quickstarts#
Isaac ROS NITROS Acceleration#
This package is powered by NVIDIA Isaac Transport for ROS (NITROS), which leverages type adaptation and negotiation to optimize message formats and dramatically accelerate communication between participating nodes.
DNN Models#
To perform DNN inferencing a DNN model is required. NGC provides SyntheticaDETR and DetectNet pre-trained models for use in your robotics application. Using TAO these pre-trained models can be fine-tuned for your application.
Click here for more information on how to use NGC models.
Packages#
Supported Platforms#
This package is designed and tested to be compatible with ROS 2 Jazzy running on Jetson, an x86_64 system with an NVIDIA GPU, or a DGX Spark workstation. Other GB10 based platforms may function, but are not part of the test matrix and we cannot guarantee their behavior.
Platform |
Hardware |
Software |
Storage |
Notes |
|---|---|---|---|---|
Jetson |
128+ GB NVMe SSD |
For best performance, ensure that power settings are configured appropriately. |
||
x86_64 |
|
32+ GB disk space available |
||
DGX |
32+ GB disk space available |
For best performance, use the supplied power adapter with the DGX Spark system. |
Isaac ROS Environment#
To simplify development, we strongly recommend leveraging the Isaac ROS CLI by following these steps. This streamlines your development environment setup with the correct versions of dependencies on all supported platforms.
Note
All Isaac ROS Quickstarts, tutorials, and examples have been designed with the Isaac ROS CLI-managed environment as a prerequisite.
Customize your Dev Environment#
To customize your development environment, refer to this guide.
Updates#
Date |
Changes |
|---|---|
2026-04-30 |
Compatibility and integration updates for the Isaac ROS 4.4.0 release |
2026-03-23 |
Introduced early-stage support for SIPL camera framework and LI Eagle stereo CoE/HSB camera with ROS |
2026-02-19 |
Support for DGX Spark and JetPack 7.1 |
2026-02-02 |
Support for two new Docker-optional development and deployment modes |
2025-10-24 |
Added Grounding DINO object detection package |
2024-12-10 |
Update to be compatible with JetPack 6.1 |
2024-09-26 |
Update for ZED compatibility |
2024-05-30 |
Added RT-DETR object detection package |
2023-10-18 |
Adding NITROS YOLOv8 decoder |
2023-05-25 |
Performance improvements |
2023-04-05 |
Source available GXF extensions |
2022-10-19 |
Updated OSS licensing |
2022-08-31 |
Update to use NITROS for improved performance and to be compatible with JetPack 5.0.2 |
2022-06-30 |
Support for ROS 2 Humble and miscellaneous bug fixes |
2022-03-21 |
Initial release |