Isaac ROS AprilTag#
Overview#
Isaac ROS AprilTag contains a ROS 2 package for detection of AprilTags, a type of fiducial marker that provides a point of reference or measure. AprilTag detections are NVIDIA-accelerated for high performance.
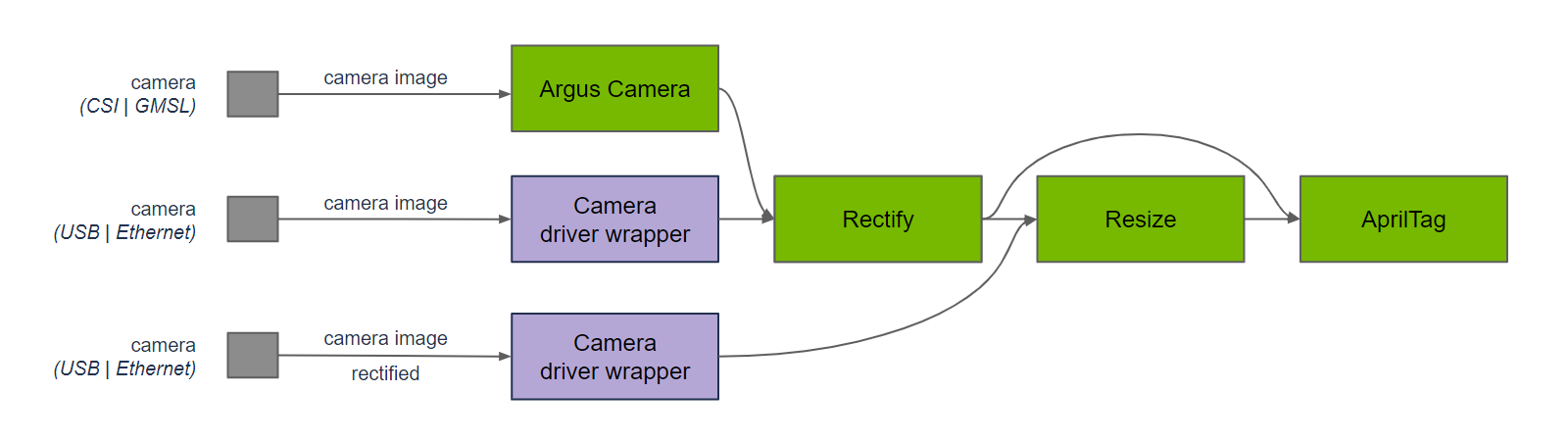
A common graph of nodes connects from an input camera through rectify and resize to AprilTag. Rectify warps the input camera image into a rectified, undistorted output image; this node may not be necessary if the camera driver provides rectified camera images. Resize is often used to downscale higher resolution cameras into the desired resolution for AprilTags if needed. The input resolution to AprilTag is selected by the required detection distance for the application, as a minimum number of pixels are required to perform an AprilTag detection and classification. For example, an 8mp input image of 3840×2160 may be much larger than necessary and a 4:1 downscale to 1920x1080 could make more efficient use of compute resources and satisfy the required detection distance of the application. Each of the green nodes in the above diagram is NVIDIA accelerated, allowing for a high-performance compute graph from camera input to AprilTag detection.
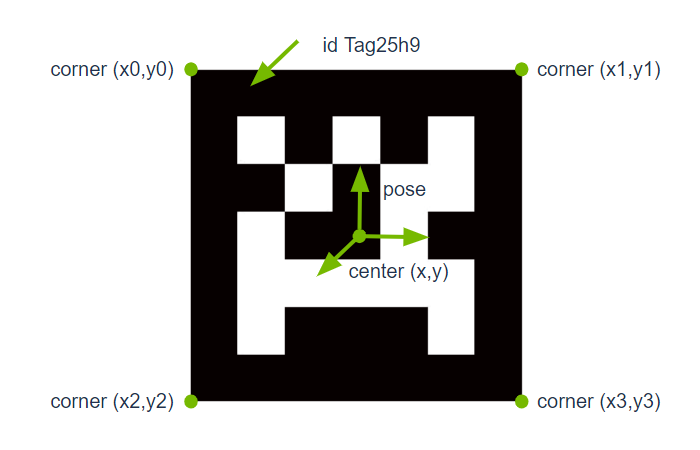
As illustrated above, detections are provided in an output array for the number of AprilTag detections in the input image. Each entry in the array contains the ID (two-dimensional bar code) for the AprilTag, the four corners ((x0, y0), (x1, y1), (x2, y2), (x3, y3)) and center (x, y) of the input image, and the pose of the AprilTag.
This package is a NVIDIA-accelerated drop-in replacement for the CPU version of ROS AprilTag. For more information, including the paper and the reference CPU implementation, refer to the AprilTag repository.
The backend parameter allows you to leverage either the CPU,
GPU on all NVIDIA-powered platforms, or PVA on Jetson devices for AprilTag detection. Below is the table of supported tag families by backend.
Tag Family |
CUDA |
CPU |
PVA |
|---|---|---|---|
|
✓ |
✓ |
✓ |
|
✓ |
✓ |
|
|
✓ |
✓ |
|
|
✓ |
✓ |
|
|
✓ |
✓ |
|
|
✓ |
✓ |
|
|
✓ |
✓ |
|
|
✓ |
✓ |
|
|
✓ |
✓ |
Quickstarts#
Isaac ROS NITROS Acceleration#
This package is powered by NVIDIA Isaac Transport for ROS (NITROS), which leverages type adaptation and negotiation to optimize message formats and dramatically accelerate communication between participating nodes.
Packages#
Supported Platforms#
This package is designed and tested to be compatible with ROS 2 Jazzy running on Jetson, an x86_64 system with an NVIDIA GPU, or a DGX Spark workstation. Other GB10 based platforms may function, but are not part of the test matrix and we cannot guarantee their behavior.
Platform |
Hardware |
Software |
Storage |
Notes |
|---|---|---|---|---|
Jetson |
128+ GB NVMe SSD |
For best performance, ensure that power settings are configured appropriately. |
||
x86_64 |
|
32+ GB disk space available |
||
DGX |
32+ GB disk space available |
For best performance, use the supplied power adapter with the DGX Spark system. |
Isaac ROS Environment#
To simplify development, we strongly recommend leveraging the Isaac ROS CLI by following these steps. This streamlines your development environment setup with the correct versions of dependencies on all supported platforms.
Note
All Isaac ROS Quickstarts, tutorials, and examples have been designed with the Isaac ROS CLI-managed environment as a prerequisite.
Customize your Dev Environment#
To customize your development environment, refer to this guide.
Updates#
Date |
Changes |
|---|---|
2026-04-30 |
Compatibility and integration updates for the Isaac ROS 4.4.0 release |
2026-03-23 |
Explicitly lists supported AprilTag tag families by backend (CUDA, CPU, PVA) in package documentation |
2026-02-19 |
Support for DGX Spark and JetPack 7.1 |
2026-02-02 |
Support for two new Docker-optional development and deployment modes |
2025-10-24 |
Use TF2 Transform Broadcaster to publish AprilTag poses, courtesy of StereoLabs |
2024-12-10 |
Added PVA and CPU backends for detector with support for new tag families |
2024-09-26 |
Update for ZED compatibility |
2024-05-30 |
Update to be compatible with JetPack 6.0 |
2023-10-18 |
Improved throughput performance, exposed new tuning parameters |
2023-05-25 |
Performance improvements |
2023-04-05 |
Source available GXF extensions |
2022-10-19 |
Updated OSS licensing |
2022-08-31 |
Update to be compatible with JetPack 5.0.2 |
2022-06-30 |
Update to use NITROS for improved performance |
2021-11-15 |
Isaac Sim HIL documentation update |
2021-11-15 |
Added launch file to work with Isaac Sim |
2021-10-20 |
Migrated to NVIDIA-ISAAC-ROS |
2021-08-11 |
Initial release to NVIDIA-AI-IOT |