isaac_ros_segment_anything#
Source code available on GitHub.
Quickstart#
Set Up Development Environment#
Set up your development environment by following the instructions in getting started.
(Optional) Install dependencies for any sensors you want to use by following the sensor-specific guides.
Note
We strongly recommend installing all sensor dependencies before starting any quickstarts. Some sensor dependencies require restarting the development environment during installation, which will interrupt the quickstart process.
Download Quickstart Assets#
Download quickstart data from NGC:
Make sure required libraries are installed.
sudo apt-get install -y curl jq tar
Then, run these commands to download the asset from NGC:
NGC_ORG="nvidia" NGC_TEAM="isaac" PACKAGE_NAME="isaac_ros_segment_anything" NGC_RESOURCE="isaac_ros_segment_anything_assets" NGC_FILENAME="quickstart.tar.gz" MAJOR_VERSION=4 MINOR_VERSION=5 VERSION_REQ_URL="https://api.ngc.nvidia.com/v2/resources/$NGC_ORG/$NGC_TEAM/$NGC_RESOURCE/versions" AVAILABLE_VERSIONS=$(curl -s \ -H "Accept: application/json" "$VERSION_REQ_URL") LATEST_VERSION_ID=$(echo $AVAILABLE_VERSIONS | jq -r " .recipeVersions[] | .versionId as \$v | \$v | select(test(\"^\\\\d+\\\\.\\\\d+\\\\.\\\\d+$\")) | split(\".\") | {major: .[0]|tonumber, minor: .[1]|tonumber, patch: .[2]|tonumber} | select(.major == $MAJOR_VERSION and .minor <= $MINOR_VERSION) | \$v " | sort -V | tail -n 1 ) if [ -z "$LATEST_VERSION_ID" ]; then echo "No corresponding version found for Isaac ROS $MAJOR_VERSION.$MINOR_VERSION" echo "Found versions:" echo $AVAILABLE_VERSIONS | jq -r '.recipeVersions[].versionId' else mkdir -p ${ISAAC_ROS_WS}/isaac_ros_assets && \ FILE_REQ_URL="https://api.ngc.nvidia.com/v2/resources/$NGC_ORG/$NGC_TEAM/$NGC_RESOURCE/\ versions/$LATEST_VERSION_ID/files/$NGC_FILENAME" && \ curl -LO --request GET "${FILE_REQ_URL}" && \ tar -xf ${NGC_FILENAME} -C ${ISAAC_ROS_WS}/isaac_ros_assets && \ rm ${NGC_FILENAME} fi
Build isaac_ros_segment_anything#
Activate the Isaac ROS environment:
isaac-ros activateInstall the prebuilt Debian package:
sudo apt-get update
sudo apt-get install -y ros-jazzy-isaac-ros-segment-anything
Install Git LFS:
sudo apt-get install -y git-lfs && git lfs install
Clone this repository under
${ISAAC_ROS_WS}/src:cd ${ISAAC_ROS_WS}/src && \ git clone -b release-4.5 https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_image_segmentation.git isaac_ros_image_segmentation
Activate the Isaac ROS environment:
isaac-ros activateUse
rosdepto install the package’s dependencies:sudo apt-get update
rosdep update && rosdep install --from-paths ${ISAAC_ROS_WS}/src/isaac_ros_image_segmentation/isaac_ros_segment_anything --ignore-src -y
Build the package from source:
cd ${ISAAC_ROS_WS} && \ colcon build --symlink-install --packages-up-to isaac_ros_segment_anything --base-paths ${ISAAC_ROS_WS}/src/isaac_ros_image_segmentation/isaac_ros_segment_anything
Source the ROS workspace:
Note
Make sure to repeat this step in every terminal created inside the Isaac ROS environment.
Since this package was built from source, the enclosing workspace must be sourced for ROS to be able to find the package’s contents.
source install/setup.bash
Prepare Segment Anything ONNX Model#
There are two Segment Anything models available to select from in the steps below: SAM and Mobile SAM. SAM provides the full accuracy of Segment Anything but can consume over 8GB of GPU memory and take more computation effort for inference. Mobile SAM, has been tuned to operate with a much smaller memory footprint and less computation overhead, but with some level of degradation in quality. Choose the model which will be the most effective for your use case.
Make a directory to place models (inside the Isaac ROS environment):
mkdir -p ${ISAAC_ROS_WS}/isaac_ros_assets/models/triton/segment_anything/1/
Create the ONNX file for SAM or for Mobile SAM.
Note
SAM is only supported with Triton using the ONNX backend. The following step is to be performed only on x86_64. You must copy the generated ONNX file to a Jetson, in case you want to run the package on the device.
Note
It is recommended to run SAM with at least 12GB+ GPU memory. Mobile SAM smaller version of SAM which can be used if GPU VRAM is not sufficient to run SAM.
Steps to use SAM
To create ONNX file for SAM. Download the PyTorch weights from Segment Anything official repository. Then, copy the downloaded model weights into the container. The model is expected to be downloaded to
~/Downloadsoutside the Isaac ROS environment.Move this file to
${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_segment_anything/using a console outside of the container and then continue inside the container.For example, if the model
vit_b.pthwas downloaded to~/Downloads:On
x86_64:# Outside container mv ~/Downloads/</path/to/vit_b> ${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_segment_anything/vit_b.pth# Inside container cd ${ISAAC_ROS_WS} pip3 install --break-system-packages git+https://github.com/facebookresearch/segment-anything.git && \ pip3 install --break-system-packages torchvision# Inside container ros2 run isaac_ros_segment_anything torch_to_onnx.py \ --checkpoint ${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_segment_anything/vit_b.pth \ --output ${ISAAC_ROS_WS}/isaac_ros_assets/models/triton/segment_anything/1/model.onnx --model-type vit_b --sam-type SAMSteps to use MobileSAM To create ONNX file for Mobile SAM. Download the PyTorch weights from Mobile SAM official repository. Then, copy the downloaded model weights into the container. The model is expected to be downloaded to
~/Downloadsoutside the Isaac ROS environment.This example uses
mobile_sam.pt, which must be copied into${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_segment_anythinginside the Isaac ROS environment:On
x86_64:# Outside container mv ~/Downloads/mobile_sam.pt ${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_segment_anything/mobile_sam.pt# Inside container cd ${ISAAC_ROS_WS} pip3 install --break-system-packages timm && \ pip3 install --break-system-packages git+https://github.com/ChaoningZhang/MobileSAM.git# Inside container ros2 run isaac_ros_segment_anything torch_to_onnx.py \ --checkpoint ${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_segment_anything/mobile_sam.pt \ --output ${ISAAC_ROS_WS}/isaac_ros_assets/models/triton/segment_anything/1/model.onnx --model-type vit_t --sam-type MobileSAM
Copy the config file:
cp ${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_segment_anything/sam_config_onnx.pbtxt ${ISAAC_ROS_WS}/isaac_ros_assets/models/triton/segment_anything/config.pbtxt
Run Launch File#
Segment Anything requires a prompt to indicate what in the image we want to segment. In this example, we will use YOLOv8 object detection to determine the image space bounding box of an object of interest to use as the prompt for Segment Anything to create an image segmentation mask for.
Continuing inside the Isaac ROS environment, install the following dependencies:
sudo apt-get update
sudo apt-get install -y ros-jazzy-isaac-ros-examples
Run the following launch file to spin up a demo of this package:
cd ${ISAAC_ROS_WS} && \ ros2 launch isaac_ros_examples isaac_ros_examples.launch.py launch_fragments:=segment_anything interface_specs_file:=${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_segment_anything/quickstart_interface_specs.json sam_model_repository_paths:=[${ISAAC_ROS_WS}/isaac_ros_assets/models/triton]
Open a second terminal and activate the Isaac ROS environment:
isaac-ros activateThen, play the rosbag:
ros2 bag play -l ${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_segment_anything/segment_anything_sample_data/
Ensure that you have already set up your RealSense camera using the RealSense setup tutorial. If you have not, set up the sensor and then restart this quickstart from the beginning.
Complete the Isaac ROS YOLOv8 tutorial up until the build step.
Continuing inside the Isaac ROS environment, install the following dependencies:
sudo apt-get update
sudo apt-get install -y ros-jazzy-isaac-ros-examples ros-jazzy-isaac-ros-realsense
Run the following launch file to spin up a demo of this package using a RealSense camera:
ros2 launch isaac_ros_examples isaac_ros_examples.launch.py launch_fragments:=realsense_mono_rect,segment_anything,yolov8 interface_specs_file:=${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_segment_anything/yolo_interface_specs.json model_file_path:=${ISAAC_ROS_WS}/isaac_ros_assets/models/yolov8/yolov8s.onnx engine_file_path:=${ISAAC_ROS_WS}/isaac_ros_assets/models/yolov8/yolov8s.plan sam_model_repository_paths:=[${ISAAC_ROS_WS}/isaac_ros_assets/models/triton]
Ensure that you have already set up your ZED camera using ZED setup tutorial.
Complete the Isaac ROS YOLOv8 tutorial up until the build step.
Continuing inside the Isaac ROS environment, install dependencies:
sudo apt-get update
sudo apt-get install -y ros-jazzy-isaac-ros-examples ros-jazzy-isaac-ros-image-proc ros-jazzy-isaac-ros-zed
Run the following launch file to spin up a demo of this package using a ZED Camera:
ros2 launch isaac_ros_examples isaac_ros_examples.launch.py \ launch_fragments:=zed_mono_rect,segment_anything,yolov8 \ interface_specs_file:=${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_segment_anything/yolo_interface_specs.json \ model_file_path:=${ISAAC_ROS_WS}/isaac_ros_assets/models/yolov8/yolov8s.onnx \ engine_file_path:=${ISAAC_ROS_WS}/isaac_ros_assets/models/yolov8/yolov8s.plan sam_model_repository_paths:=\ [${ISAAC_ROS_WS}/isaac_ros_assets/models/triton] \ interface_specs_file:=${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_segment_anything/zed2_quickstart_interface_specs.json
Note
If you are using the ZED X series, replace zed2_quickstart_interface_specs.json with zedx_quickstart_interface_specs.json in the above command.
Visualize Results#
Open a new terminal inside the Isaac ROS environment:
isaac-ros activateInstall
cv_bridge:sudo apt-get install -y ros-jazzy-cv-bridge
Run the Python script to generate the colored segmentation mask from raw mask.
Note
For Rosbag use case run following command to run the script:
ros2 run isaac_ros_segment_anything visualize_mask.py --remap /yolov8_encoder/resize/image:=/image
ros2 run isaac_ros_segment_anything visualize_mask.py
Open another terminal and activate the Isaac ROS environment:
isaac-ros activateInstall
rqt_image_view:sudo apt-get install -y ros-jazzy-rqt-image-view
Launch
rqt_image_view:ros2 run rqt_image_view rqt_image_view /segment_anything/colored_segmentation_mask
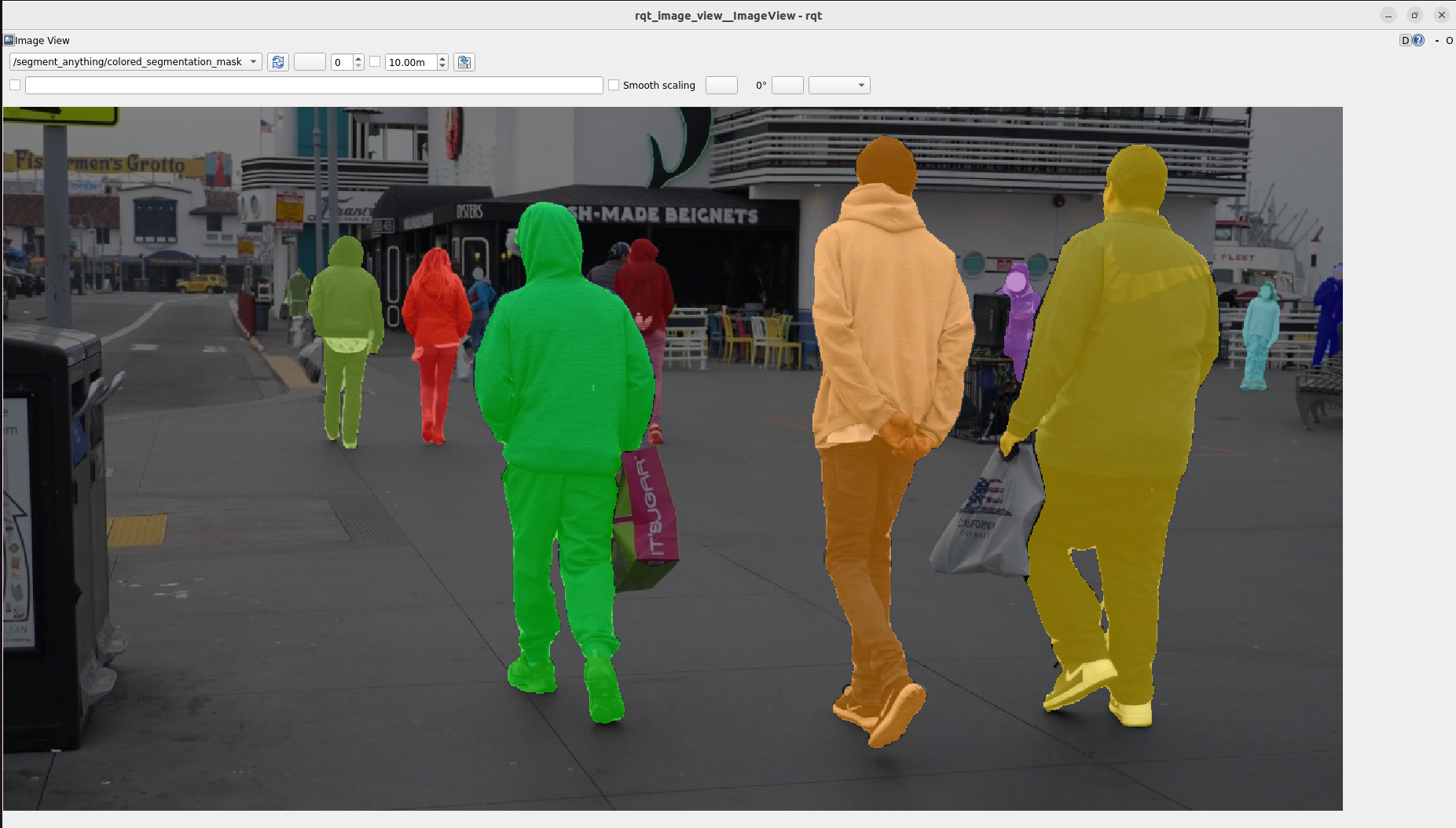
Note
The raw segmentation mask is also published to
/segment_anything/raw_segmentation_mask. However, the raw pixels correspond to the class labels and so the output is unsuitable for human visual inspection.
Note
Segment Anything is designed to perform image segmentation on previously unseen objects without model retraining. As a result, inference requires significant GPU compute for this task. Refer to performance of the model for your target platform to determine which model variants to use.
More powerful discrete GPUs can outperform all other platforms for this task and should be preferred if higher performance is required. Interleaving image segmentation with other tasks rather than running continuously can be a more effective solution as well. Finally, if runtime performance is critical and offline training resources are available, developers can train Unet for their own target objects using synthetic data generation and/or real-world data for faster image segmentation.
Try More Examples#
To continue your exploration, check out the following suggested examples:
Troubleshooting#
Isaac ROS Troubleshooting#
For solutions to problems with Isaac ROS, see here.
Deep Learning Troubleshooting#
For solutions to problems with using DNN models, see here.
API#
Usage#
A single launch file is provided for this package. The launch file launches isaac_ros_triton with ONNX backend.
Only the ONNX backend with Triton is supported for this model.
Note
For your specific application, these launch files may need to be modified. Consult the available components to see the configurable parameters.
Launch File |
Components Used |
|---|---|
|
ResizeNode, PadNode, ImageFormatConverterNode, ImageToTensorNode, ImageTensorNormalizeNode, InterleavedToPlanarNode, ReshapeNode, TritonNode, SegmentAnythingDecoderNode, SegmentAnythingDataEncoderNode, DummyMaskPublisher |
SegmentAnythingDecoderNode#
ROS Parameters#
ROS Parameter |
Type |
Default |
Description |
|---|---|---|---|
|
|
|
The width of the segmentation mask. |
|
|
|
The height of the segmentation mask. |
|
|
|
Maximum number of prompt inputs for each frame. |
Note
If a frame does not have any input prompt then no mask is generated for that particular frame.
If frame input prompts are larger than the max_batch_size, then first max_batch_size input prompts are considered.
ROS Topics Subscribed#
ROS Topic |
Interface |
Description |
|---|---|---|
|
List of Output Tensors from the SAM model. |
Note
All input images are required to have height and width that are both an even number of pixels.
ROS Topics Published#
ROS Topic |
Interface |
Description |
|---|---|---|
|
The raw segmentation mask, A Tensor with shape [batch_size, 1, orig_img_height, orig_img_width]. Where batch_size is number of prompt inputs for that frame. |
SegmentAnythingDataEncoderNode#
ROS Parameters#
ROS Parameter |
Type |
Default |
Description |
|---|---|---|---|
|
|
|
Type of Prompt Input. Supported Types: |
|
|
|
Whether there is any input mask for SAM or not. |
|
|
|
Maximum number of prompt inputs for each frame. |
|
|
|
Dimensions of the Original Image in |
ROS Topics Subscribed#
ROS Topic |
Interface |
Description |
|---|---|---|
|
Input Detection2DArray, If prompt type is |
|
|
The preprocessed & encoded image tensor. |
|
|
Input mask for SAM. |
ROS Topics Published#
ROS Topic |
Interface |
Description |
|---|---|---|
|
Tensor List which has all the required tensors for SAM inference. |
DummyMaskPublisher#
This node can be used to publish dummy mask to SAM in case there is no mask input to use.
ROS Parameters#
ROS Parameter |
Type |
Default |
Description |
|---|---|---|---|
|
|
|
Name of the mask tensor. |
ROS Topics Subscribed#
ROS Topic |
Interface |
Description |
|---|---|---|
|
The data from this topic is used to timestamp the dummy mask. |
ROS Topics Published#
ROS Topic |
Interface |
Description |
|---|---|---|
|
Dummy mask is published on this topic. Which is supposed to be ingested by SegmentAnythingDataEncoderNode |