RealSense Issues#
This page contains troubleshooting for the RealSense Camera Examples. The example combines nvblox-based reconstruction with VSLAM. Both of these processes, nvblox and VSLAM, are driven by the RealSense depth camera.
For details on the usage of the RealSense camera streams, refer to the technical details section.
Symptom: No reconstruction appears in RViz#
The terminal reports:
[nvblox_node-3] Warning: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist
[nvblox_node-3] at line 93 in /opt/ros/jazzy/src/geometry2/tf2/src/buffer_core.cpp
[nvblox_node-3] Warning: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist
[nvblox_node-3] at line 93 in /opt/ros/jazzy/src/geometry2/tf2/src/buffer_core.cpp
Explanation: This message is repeating because nvblox can’t get the
camera pose in the odom frame. Typically, this means that VSLAM is not publishing anything because it
is not receiving input data.
Typical causes are:
Images not coming off the camera into Linux.
Images not being published by the ROS node.
Images not making it through the splitter (usually because the metadata does not contain the projector state).
There are three different solutions.
Issue#
It appears that the underlying issue is that RealSense does not support recent versions of the Linux kernel (see here for the list of supported kernel versions). There are some related issues here and here.
To determine next steps, try the following checks:
Check #1 - Images and Metadata are coming into Linux
Check that images are making it off the camera. Start the
realsense-viewer.
realsense-viewer
Then:
Before turning on the “Stereo Module” click the drop down arrow (red box below) and turn on Infrared camera.
Turn on the stereo module.
Click the further drop down label controls and click on the option “Emitter On Off”. (purple box below)
In the upper right, change from 3D view to 2D. (green box below)
Verify that you see an image similar to the one below.
On the grayscale image, click the left-most icon in the upper-right-hand corner, which looks like three horizontal bars with two tiny check marks. This displays the metadata. (orange box below)
You might see two images like:
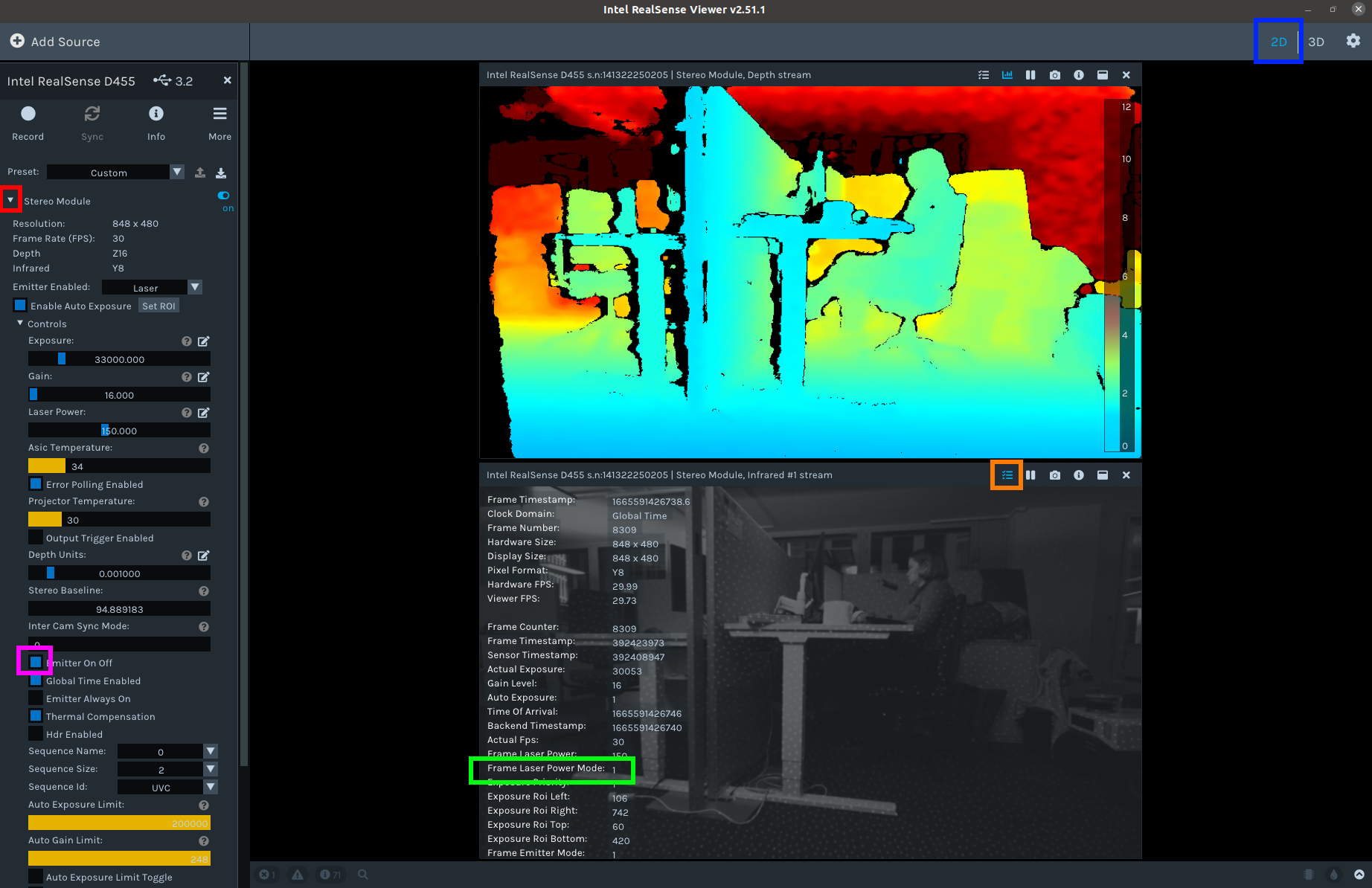
If you see the metadata labeled “Frame Laser Pose Mode” (green box above) flicking between 0 and 1 with the emitter, this is working properly. If not, preceded to the section below for Solution 1 - Install DKMS.
Check #2 - Check Images are Being Published in ROS
If your realsense-viewer is operating as expected by showing IR images and emitter-state metadata,
but the nvblox, VSLAM, RealSense example is still not generating a reconstruction:
Start the example:
ros2 launch nvblox_examples_bringup realsense_example.launch.py
In RViz, verify that the following images can be viewed:
Topics before splitter:
/camera/color/image_raw/camera/depth/image_rect_raw/camera/infra1/image_rect_raw/camera/infra2/image_rect_raw
Topics after splitter:
/camera/realsense_splitter_node/output/depth/camera/realsense_splitter_node/output/infra_1/camera/realsense_splitter_node/output/infra_2
The topics can be viewed by changing the topic field of the image topic (red box below).
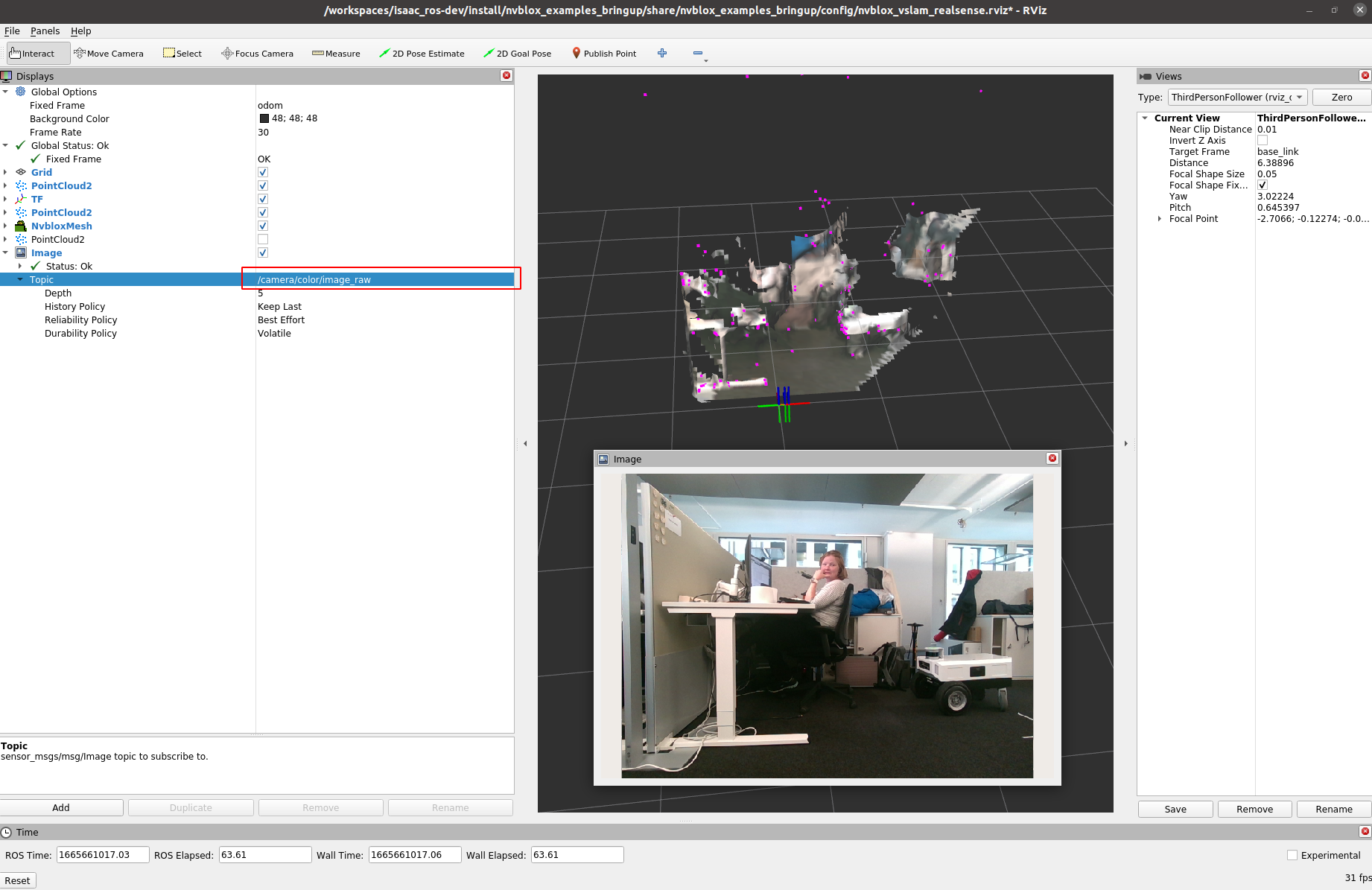
If the topics before the splitter are not all viewable, preceded to Solution 2 - Build without CUDA - build
realsense-roswithout CUDA.
If only the topics after the splitter are not available and Check #1 passed, contact NVIDIA.
Solutions#
Solutions to try:
Install the RealSense DKMS
Build without CUDA
Both of the above
Try the solution the above checks directed you to. Repeat the checks 1 and 2.
Solution 1 - Install DKMS
If you are still getting no images off the camera, or you don’t get the correct metadata field:
On a supported kernel version, install
librealsense-dkms. The apt package patches the kernel, such that the RealSense operates as expected.
If everything is as expected on a supported kernel and you run:
USERNAME@HOSTNAME:~/workspaces/isaac_ros-dev/src/isaac_ros_common (dev)$ uname -r
5.8.0-43-generic
USERNAME@HOSTNAME:~/workspaces/isaac_ros-dev/src/isaac_ros_common (dev)$ dkms status
librealsense2-dkms, 1.3.18, 5.8.0-43-generic, x86_64: installed
librealsense2-dkms, 1.3.18, 5.8.0-67-generic, x86_64: installed
nvidia, 510.85.02, 5.13.0-40-generic, x86_64: installed
nvidia, 510.85.02, 5.8.0-43-generic, x86_64: installed
USERNAME@HOSTNAME:/lib/udev/rules.d$ modinfo uvcvideo | grep "version:"
version: 1.1.2.realsense-1.3.18
srcversion: 964E8D3335D17053B8EEDD2
Verify that the word realsense appears.
Typically, it appears after the second command, next to your version of the
kernel or after the third command.
If you have a recent kernel and the words RealSense do not appear, or appear in the second command next to an old kernel version. For example:
USERNAME@HOSTNAME:~$ uname -r
5.15.0-48-generic
USERNAME@HOSTNAME:~$ dkms status
nvidia, 510.85.02, 5.15.0-48-generic, x86_64: installed
USERNAME@HOSTNAME:~$ modinfo uvcvideo | grep "version:"
version: 1.1.1
srcversion: 18D809600E7D1E107042647
The solution is to install the DKMS for recent versions of the kernel, from:
Download the .deb file named
librealsense2-dkms-dkms_1.3.14_amd64.deb.In the directory where you downloaded the file, run:
sudo apt install ./librealsense2-dkms-dkms_1.3.14_amd64.deb
Verify that the following is returned:
USERNAME@HOSTNAME:~$ uname -r
5.15.0-48-generic
USERNAME@HOSTNAME:~$ dkms status
librealsense2-dkms, 1.3.14, 5.15.0-48-generic, x86_64: installed
librealsense2-dkms, 1.3.14, 5.15.0-50-generic, x86_64: installed
nvidia, 510.85.02, 5.15.0-48-generic, x86_64: installed
nvidia, 510.85.02, 5.15.0-50-generic, x86_64: installed
nvidia, 510.85.02, 5.4.0-126-generic, x86_64: installed
nvidia, 510.85.02, 5.4.0-128-generic, x86_64: installed
USERNAME@HOSTNAME:~$ modinfo uvcvideo | grep "version:"
version: 1.1.2.realsense-1.3.14
srcversion: 26234508927E0F6886C9A48
Repeat check 1. You should have images and metadata.
Solution 2 - Build without CUDA
If check 1 passed, you have images on your machine and
metadata, but you have no images in ROS. The solution is to build
librealsense without CUDA.
Manually build
librealsensewithin the container without CUDA.Run the following commands within the Isaac ROS environment:
/opt/realsense/build-librealsense.sh -n
Rebuild the ROS 2 workspace:
rm -rf build/ install/ log/
colcon build --symlink-install --continue-on-error
source install/setup.bash
Go back and repeat check 2.
Verify that you have images in ROS before and after the splitter.
Still Not Working#
If none of the previous solutions solved the problem, try build with:
-DFORCE_RSUSB_BACKEND=true
as reported in issue 10439.
Otherwise, file an issue, and describe the steps you have taken.
Symptom: Multi-RealSense has poor tracking and reconstruction#
Issue#
cuVSLAM might be consuming infra images with the emitter on resulting in poor tracking.
nvblox might be consuming depth images with the emitter off resulting in poor reconstruction.
This may occur when a camera has the emitter on for frames where the metadata says it’s off and vice versa in emitter_on_off mode.
This leads to the splitter filtering the opposite images to cuVSLAM and nvblox.
To confirm, view following topics in RViz or Foxglove:
/camera0/realsense_splitter_node/output/infra_1
/camera1/realsense_splitter_node/output/infra_1
/camera2/realsense_splitter_node/output/infra_1
/camera3/realsense_splitter_node/output/infra_1
These infra frames after the splitter should have the emitter off but in visual inspection you clearly see an infrared projector pattern.
Solution 1#
As of writing, this is a known camera FW issue and is pending fixes from RealSense.
This problem may be mitigated by restarting the camera or toggling the emitter_on_off mode on and off for the affected camera while it’s running. This would correct the emitter state such that the metadata reflects it’s true state.
For example if camera0 has an invalid inverted emitter state, run the following commands in another terminal:
ros2 param set /camera0 depth_module.emitter_on_off false
ros2 param set /camera0 depth_module.emitter_on_off true
However this may not be a permanent fix and it’s been observed that the emitter state may invert again during runtime.
Solution 2#
You may also invert the logic for handling the depth and infra frames based on the emitter state if this is consistently occurring for your cameras. See realsense_splitter_node.cpp.