Nova Carter
Nova Carter was jointly developed with Segway Robotics, for autonomous robotics development including accelerated computing for ROS 2 with full 360° sensing from camera and LIDAR and validated by Open Navigation for use with Nav2.
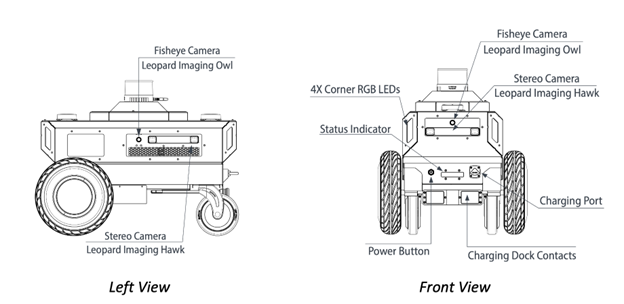
Nova Carter is powered by a Jetson AGX Orin with additional interface I|O boards developed for robotics; it includes
1x 32 beam 360° LIDAR
2x planar LIDARs
4x HAWK stereo cameras (1920x1200, 60 FPS, 120° FOV)
4x OWL fisheye cameras (1920x1200, 120 FPS, 202°± 3° FOV)
IMU, Magnetometer, and Barometer
Nova Carter allows high-precision time synchronization between sensors using hardware time stamping, and PTP over Ethernet with less than 10us for sensor acquisition time. The robot provides simultaneous camera capture across all cameras within 100us from a single hardware trigger, and can write to disk at 4 GB per second for sensor capture to ROSbags.
Nova Carter robots running Isaac ROS can be teleoperated, map an environment, and navigate within that environment using visual cameras and LiDARs.
Setup the Nova Carter
Review the following guide to set up your Nova Carter, and visualize sensor output.
Tutorials
Once you set up Nova Carter successfully, you can run the demo listed below.
You are recommended to go through tutorials of running camera-based 3D perception to run, and evaluate Isaac Perceptor on the Nova Carter.