Foxglove Visualization#
Foxglove is a popular framework to visualize ROS running applications similar to Rviz. It provides a web-based visualization client and a desktop app.
Many Isaac ROS tutorials use Foxglove for the visualization.
Foxglove Setup#
Use the following steps to visualize a ROS application in Foxglove.
On your visualization computer install Foxglove Studio and launch it:
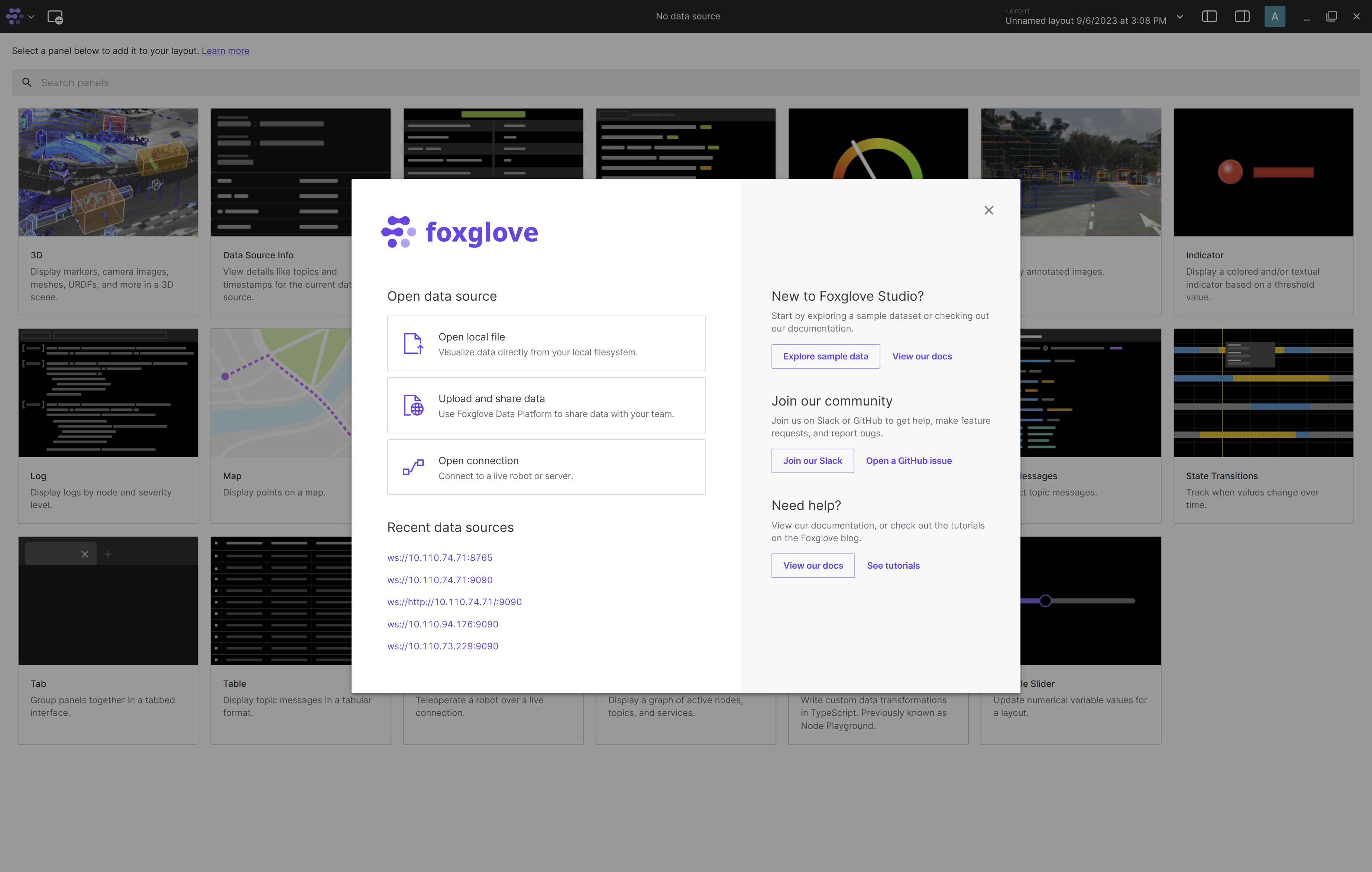
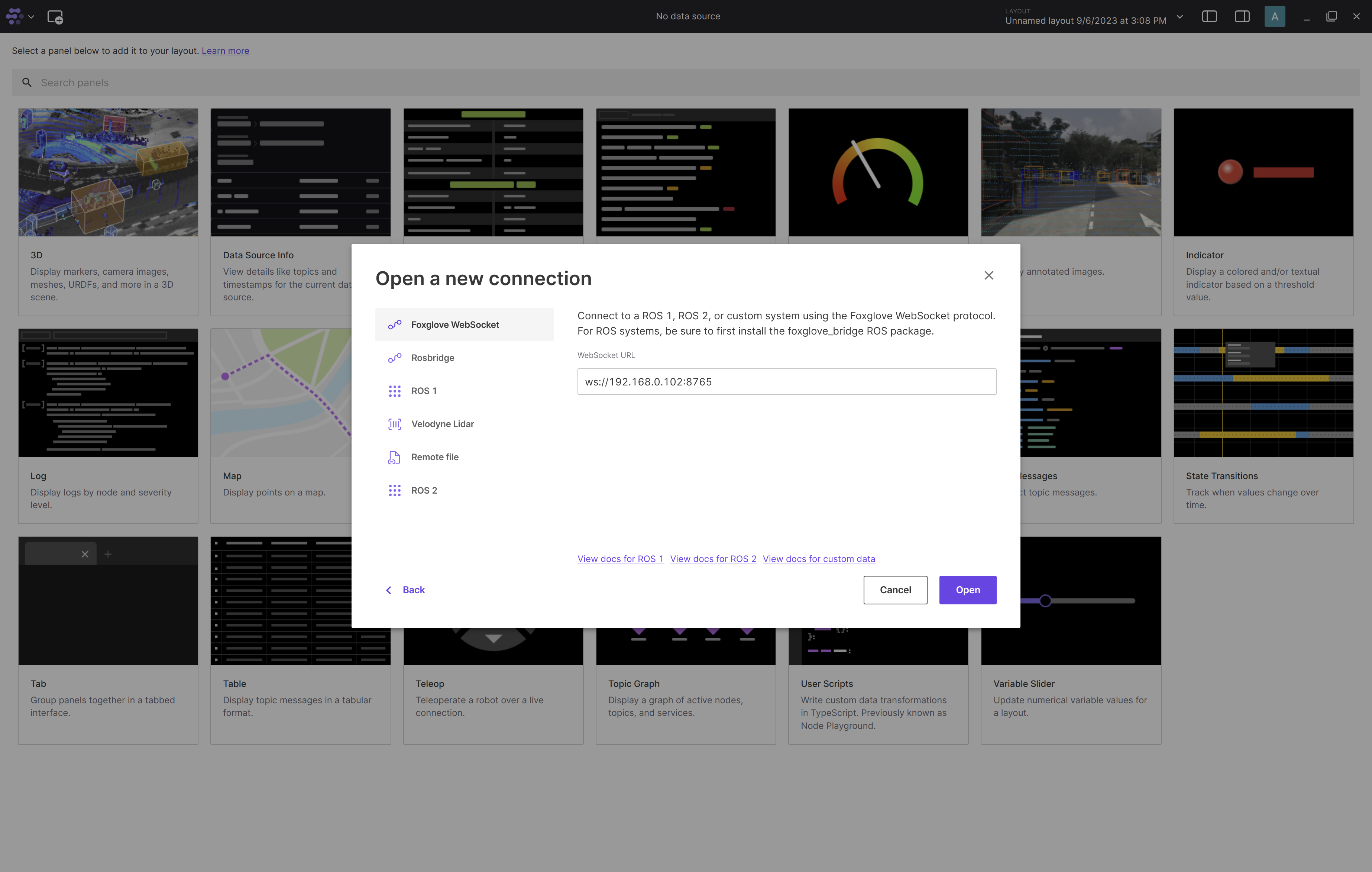
Click on the Open connection button. If you are running the ROS application on a different machine than the one that is running Foxglove you’ll have to adjust the Websocket URL. In that case, replace
localhostwith the IP of the ROS machine.
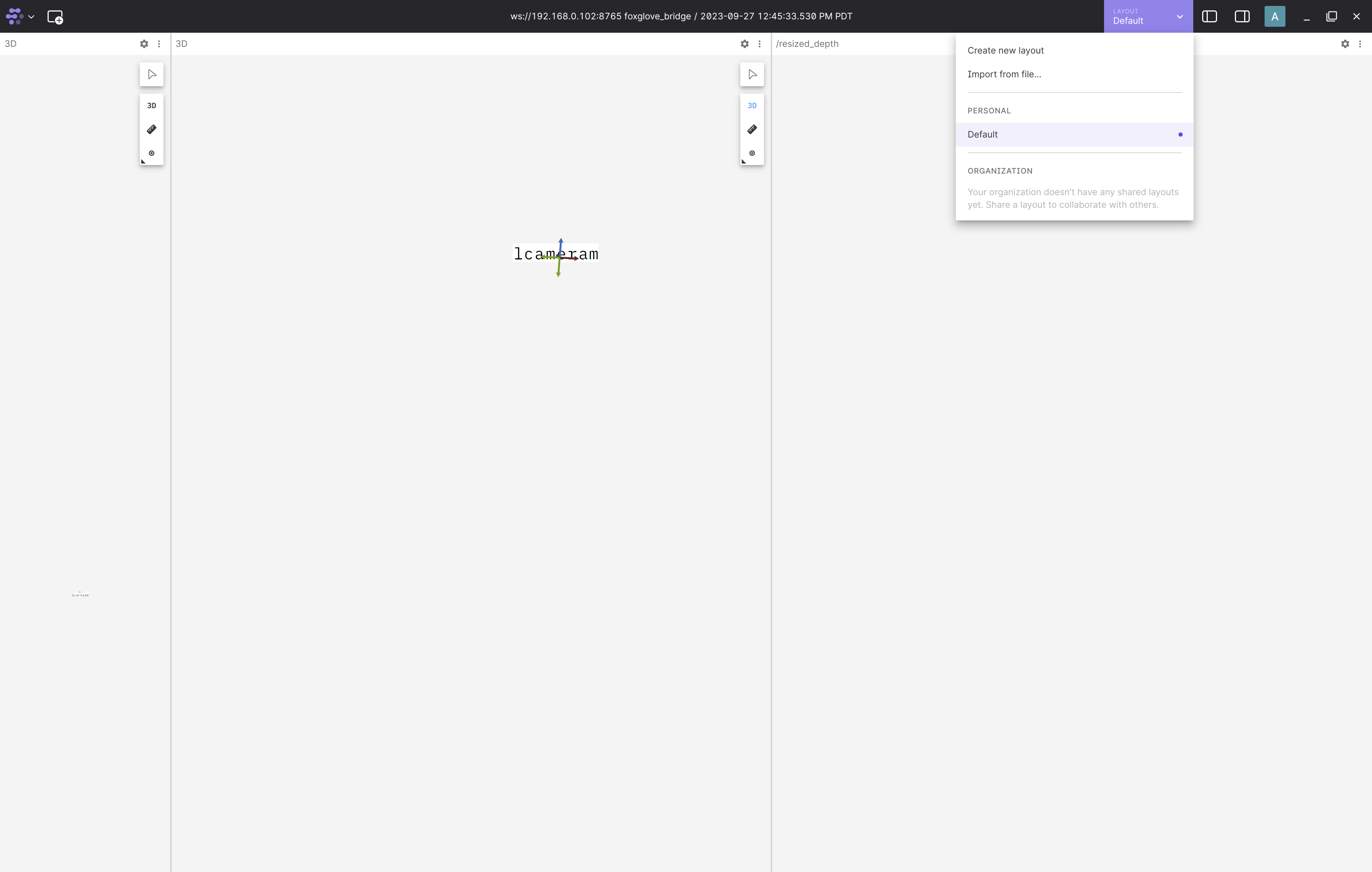
You can now add a 3D panel and select which topics to visualize in the left bar.
Some tutorials also provide a pre-configured Foxglove layout in the form of a JSON file. To use those make sure you have the repository containing the tutorial cloned on your visualization machine. Import the layout file by clicking on the
Import from file...in thelayoutdrop-down menu and choosing the layout file from the correct folder.
Installing Additional Extensions#
Some visualizations require additional extensions. You can install those extensions by clicking on the user icon in the top right corner and then opening the extensions menu. There you will find a list of all available extensions. An extension can be installed by clicking on it and pressing the install button.
We provide the following extensions:
Nvblox Foxglove: Allows to visualize Nvblox meshes in Foxglove.
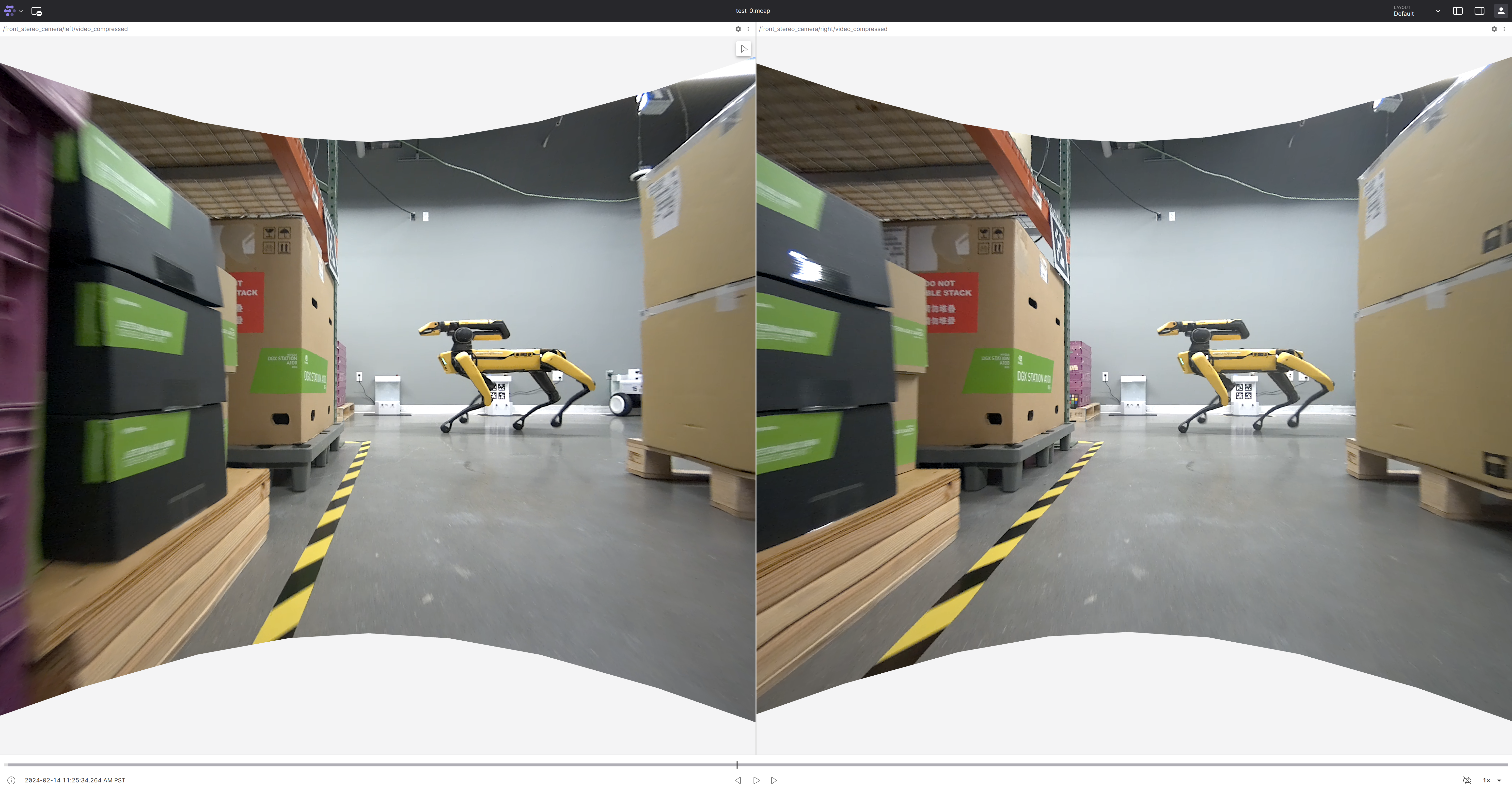
Rosbag Visualization#
To visualize a rosbag, follow these steps:
Note
If your rosbag contains compressed images, you may need to convert them from sensor_msgs/msg/CompressedImage to foxglove_msgs/msg/CompressedVideo for optimal visualization in Foxglove.
Launch Foxglove Studio and click on the Open local file button.
Navigate to the rosbag and select the MCAP file to visualize it in Foxglove.