Tutorial: End-to-End Visual and Occupancy Map Creation#
This tutorial describes how to create maps for visual localization including visual global (cuVGL) localization map creation, cuVSLAM map creation, and occupancy grid map creation. The three types of maps share the same coordinate system. The poses from cuVGL and cuVSLAM localization align with the occupancy map.
Before starting the steps of the tutorial, read the sections as directed to learn more about concepts for your particular situation:
To understand the different types of maps generated from the workflow, read the Map Types section.
If you collect your own rosbag for map creation, read the following sections:
You can use this tutorial to:
Create maps from an existing rosbag in the Quick Start with an Existing Rosbag section.
Use a RealSense camera for map creation and localization, in the Map and Localize with a RealSense section.
Verify the map quality in the Map Quality Verification section.
Map Types#
The following list provides examples of some of the different types of maps that are generated with
rosbags when running the create_map_offline.py script:
cuVSLAM Map
cuVSLAM is able to create a map and load a saved map of an environment. It can then use that map to improve localization performance and maintain a consistent global frame of reference.
Visual Global Localization Map
During startup or after losing localization, the visual global localization map can be used to globally localize on a previously created map and operate in a shared global frame.
For more info about visual global localization, refer to: Concepts: Visual Global Localization
Occupancy Grid Map
Navigation packages such as nav2 use an occupancy grid map to represent the obstacles in a map. We use cuVSLAM, Stereo Depth and Nvblox to build an occupancy grid map from images.
Note
The generated occupancy map is only intended to be used for global path planning. Specifically it is not intended to be used for 2D Lidar localization. The generated map may contain slight artifacts and imprecisions and therefore is expected to be used with a planner that inflates obstacles.
Because the ROS2 rosbag replay is nondeterministic, each run of the occupancy map creation can produce a slightly different map.
Data Collection#
Closed Loop Segments: Build mapping trajectories in loops or segments of around 5-10 meters. This ensures that the same area is captured from different angles, which improves map detail and reduces drift.
Avoid Long Straight Paths: Long drives in unexplored areas accumulate drift risk. Use short, closed loops instead.
Vary Camera Angles: Capturing locations from multiple angles makes the visual map more reliable for future localization.
The following schematic examples show efficient mapping paths in both narrow corridors and open spaces. They demonstrate optimal patterns for capturing comprehensive visual data and reducing tracking drift:
Note
For optimal pose correction and map accuracy, Loop Closing must be effectively exploited. This mechanism corrects the robot’s pose when the robot revisits a previously mapped location.
Camera Calibration#
In this tutorial, “raw” means original images with distortion, and “rectified” means stereo rectified images without distortion.
Ensure the following topics are recorded in the rosbag:
static transform between base frame and camera frame.
raw or rectified images.
camera parameters.
Here is an example of the left camera topic names being given image types and compression:
Image Type |
Camera Info |
Image |
Compressed Image |
|---|---|---|---|
Raw |
/<camera_name>/left/camera_info |
/<camera_name>/left/image_raw |
/<camera_name>/left/image_raw/compressed |
Rectified |
/<camera_name>/left/camera_info_rect |
/<camera_name>/left/image_rect |
/<camera_name>/left/image_rect/compressed |
Change the camera info and image topic names for the right camera by replacing “left” with “right” in the above table.
If your rosbag topic names are different from the default ones, create a camera topic config that matches with your rosbag recording and use it in the map creation step. For example:
stereo_cameras: - name: <camera_name> left: /<camera_name>/left/image_raw left_frame_id: <camera_name>_left_optical_frame left_camera_info: /<camera_name>/left/camera_info right: /<camera_name>/right/image_raw right_camera_info: /<camera_name>/right/camera_info right_frame_id: <camera_name>_right_optical_frame
You must either provide stereo-rectified images or supply the stereo rectification parameters in the camera info when using raw images.
You can use the following checks to verify that the calibration is configured correctly.
k and d correspond to the raw images.
r is typically not an identity matrix, since rectification is still required.
k (raw intrinsics) is typically different from the first 3x3 block in p, because p contains the rectified intrinsics.
The first 3x3 block in p is the same for both left and right images, because both are projected to the same rectified image plane.
d is an empty or all zeros (no distortion remains after rectification).
k is typically matches the first 3x3 block of p, since both describe the same rectified intrinsics.
r depends on the frame_id:
If frame_id refers to rectified optical frame, r should be identity (no transform needed).
If frame_id refers to raw optical frame, r is typically not identity (a transform from raw to rectified is needed).
Set Up Development Environment#
Set up your development environment by following the instructions in getting started.
(Optional) Install dependencies for any sensors you want to use by following the sensor-specific guides.
Note
We strongly recommend installing all sensor dependencies before starting any quickstarts. Some sensor dependencies require restarting the development environment during installation, which will interrupt the quickstart process.
Check GPU Memory (x86 Only)#
Warning
Map creation only works with x86 laptops with NVIDIA GPU (compute_capability >= 8.0 and 8 GB RAM or higher).
Map Creation will use all the CPU and GPU resources, make sure you do not have anything important running at the same time.
Activate the Isaac ROS environment:
isaac-ros activateCheck GPU memory:
Install the tool to check GPU memory inside the container:
pip install gpustat --break-system-packages
Run the command to check the GPU memory:
gpustat
The output will show GPU information. For example:
[0] NVIDIA RTX A6000 | 44°C, 0 % | 15 / 49140 MB |
In this example, the GPU has 49140 MB (approximately 49 GB) of total memory.
Set the model resolution environment variable based on your GPU memory:
For above 16 GB, set:
export FOUNDATIONSTEREO_MODEL_RES=high_res
For less than 16 GB, set:
export FOUNDATIONSTEREO_MODEL_RES=low_res
Build isaac_mapping_ros#
Activate the Isaac ROS environment:
isaac-ros activate(X86 Only) Run GPU memory check to set the environment variable for the FoundationStereo model resolution:
export FOUNDATIONSTEREO_MODEL_RES=<high_res|low_res>
Install the prebuilt Debian packages:
sudo apt-get update
sudo apt-get install -y ros-jazzy-isaac-mapping-ros && \ sudo apt-get install -y ros-jazzy-isaac-ros-foundationstereo-models-install
Download and install the FoundationStereo model files:
ros2 run isaac_ros_foundationstereo_models_install install_foundationstereo_models.sh --eula \ --model_res ${FOUNDATIONSTEREO_MODEL_RES}
Install Git LFS:
sudo apt-get install -y git-lfs && git lfs install
Clone this repository under
${ISAAC_ROS_WS}/src:cd ${ISAAC_ROS_WS}/src && \ git clone -b release-4.5 https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_mapping_and_localization.git isaac_ros_mapping_and_localization
Activate the Isaac ROS environment:
isaac-ros activate(X86 Only) Run GPU memory check to set the environment variable for the FoundationStereo model resolution:
export FOUNDATIONSTEREO_MODEL_RES=<high_res|low_res>
Use
rosdepto install the package’s dependencies:sudo apt-get update
rosdep update && rosdep install --from-paths ${ISAAC_ROS_WS}/src/isaac_ros_mapping_and_localization/isaac_mapping_ros --ignore-src -y
Download and install the FoundationStereo model files:
sudo apt-get install -y ros-jazzy-isaac-ros-foundationstereo-models-install && \ ros2 run isaac_ros_foundationstereo_models_install install_foundationstereo_models.sh --eula \ --model_res ${FOUNDATIONSTEREO_MODEL_RES}
Build the package from source:
cd ${ISAAC_ROS_WS} && \ colcon build --symlink-install --packages-up-to isaac_mapping_ros --base-paths ${ISAAC_ROS_WS}/src/isaac_ros_mapping_and_localization/isaac_mapping_ros
Source the ROS workspace:
Note
Make sure to repeat this step in every terminal created inside the Isaac ROS environment.
Because this package was built from source, the enclosing workspace must be sourced for ROS to be able to find the package’s contents.
source install/setup.bash
Quick Start with an Existing Rosbag#
Note
Make sure that the rosbag and output map folder path are mounted to the Isaac ROS environment.
You can add them in ~/.isaac_ros_dev-dockerargs then restart the Isaac ROS environment.
Download the
r2b_galileodataset from the r2b 2024 dataset on NGC. It is a 20-second rosbag containing synchronized images from four stereo camera pairs.Open a terminal and activate the Isaac ROS environment:
isaac-ros activate(X86 Only) Run GPU memory check to set the environment variable for the FoundationStereo model resolution:
export FOUNDATIONSTEREO_MODEL_RES=<high_res|low_res>
Create the maps mentioned above using the following command:
ros2 run isaac_mapping_ros create_map_offline.py \ --sensor_data_bag=<PATH_TO_BAG> \ --base_output_folder=<PATH_TO_OUTPUT_FOLDER> \ --fs_model_res=${FOUNDATIONSTEREO_MODEL_RES}
After successful completion, verify that you see a message confirming that maps have been created. The full logs for each step are stored in the outputs. All steps include:
Extract edex step extracts RGB images and metadata from rosbag.
Create cuVSLAM map step computes the cuVSLAM pose and map.
Optimize odometry pose with keyframe pose step processes the odometry pose and loop closures computed by cuVSLAM and outputs more accurate odometry poses.
Update frame metadata pose step updates the image metadata with the computed poses.
Select map frames step samples key frames using a translation and rotation distance from all images.
Copy map frames step copies the sampled keyframes to a keyframe folder.
Run Foundation Stereo inference step runs Foundation Stereo inference on keyframes and outputs depth images.
Run Nvblox step creates a 2D occupancy map from keyframes using RGB+depth images and poses.
Extract features step extracts
ALIKEDimage features for keyframes.Build vocabulary step builds a visual vocabulary from extracted features.
Build BoW index step builds a bag-of-words image retrieval database from extracted features, which together with vocabulary form the global localization map.
Verify occupancy_map.png file in the output map folder:
Map and Localize with a RealSense#
Warning
Mapping workflow works best in closed, structured indoor spaces with nearby visual features. In more open environments or scenes with far backgrounds, mapping accuracy can degrade due to fewer constraints.
Glass and very thin structures such as wires and cable railings cannot be detected by the current stereo networks used for depth estimation. If you have such structures in your environment, you might need to modify the environment so that they are more visible features, to have the unnavigable areas correctly estimated.
The quality of the occupancy map is dependent on the disparity data provided to Nvblox. Degraded results can occur for wall corners. Improved results might be achieved with alternative stereo modalities, such as a different stereo camera or other AI/DNNs for stereo disparity estimation.
You can use a RealSense D435i camera for following the steps below.
Activate the Isaac ROS environment for every new terminal created when running the following steps
by running the command isaac-ros activate in the terminal.
Set up the development environment by following Set Up Development Environment instructions.
Build the package by following Build Isaac Mapping ROS Package instructions.
Set up the RealSense camera by following the RealSense Setup instructions. Plug in the camera and run the command
rs-enumerate-devices -Sin the terminal to check the camera model. For example:Device Name Serial Number Firmware Version Intel RealSense D435I 337122071493 5.16.0.1
Set up visualization.
Follow the Foxglove setup guide to launch Foxglove.
Download Foxglove layout file from localize_realsense.json.
Import the downloaded layout file into Foxglove.
Run a quick check on cuVSLAM result with RealSense camera.
Open a terminal and activate the Isaac ROS environment:
isaac-ros activateLaunch the RealSense camera with cuVSLAM node.
ros2 launch isaac_mapping_ros localize_realsense.launch.py enable_vgl:=False
Move the camera forward by 1m, and verify the cuVSLAM reports a translation of around
[1.0, 0.0, 0.0]in the Foxglove panel. If the reported odometry measurement is inaccurate, make sure the environment has sufficient near-distance objects for feature tracking, and verify the camera calibration is correct.
Record a rosbag for map creation.
Launch the RealSense camera:
ros2 launch isaac_mapping_ros localize_realsense.launch.py \ enable_vslam:=False \ enable_vgl:=False
In a new terminal, activate the Isaac ROS environment
isaac-ros activateThen, start rosbag recording:
ros2 bag record \ /tf_static \ /realsense/left/camera_info_rect \ /realsense/left/image_rect \ /realsense/right/camera_info_rect \ /realsense/right/image_rect \ --storage mcap \ -o <PATH_TO_BAG>
Collect data following the Data Collection guidelines. Additionally, follow these recommendations for handheld mapping bags:
Hold the camera in the correct orientation. For the Intel RealSense Depth Camera D435i, the screw hole should face downward while recording.
Record in areas with sufficient nearby visual features. Avoid scenes dominated by distant backgrounds.
Avoid sudden or sharp motions. Keep the camera facing forward, and rotate it smoothly when looking up, down, or around.
Start and stop recording at approximately the same pose to help ensure loop closure.
Move the camera close to the objects you want to map, including the ground and surrounding structures.
An example of a recording captured around a cafe table area:
After data collection is finished, use
ctrl+cto stop the rosbag recording and camera driver. Verify the rosbag contains all the topics listed above by running the commandros2 bag info <PATH_TO_BAG>.
(X86 Only) Run GPU memory check to set the environment variable for the FoundationStereo model resolution:
export FOUNDATIONSTEREO_MODEL_RES=<high_res|low_res>
Create maps for the RealSense rosbag using the following command:
ros2 run isaac_mapping_ros create_map_offline.py \ --sensor_data_bag=<PATH_TO_BAG> \ --base_output_folder=<PATH_TO_OUTPUT_FOLDER> \ --camera_topic_config=$(ros2 pkg prefix isaac_mapping_ros --share)/configs/data_converter_realsense.yaml \ --base_link_name=camera_link \ --fs_model_res=${FOUNDATIONSTEREO_MODEL_RES}
The
--base_link_nameis used to specify the TF frame name in your rosbag. The--camera_topic_configis used to specify the YAML file for the custom camera topic, camera info topic, and camera frame names.Verify the map quality by referring to the Map Quality Verification section.
Export the TensorRT engine file as described in Export TensorRT Engine Files.
Run live localization using the maps generated above:
ros2 launch isaac_mapping_ros localize_realsense.launch.py \ map_dir:=<PATH_TO_OUTPUT_FOLDER> \ vgl_model_dir:=<PATH_TO_MODEL_DIR>
It starts the RealSense camera, cuVSLAM and cuVGL nodes, and an occupancy map server.
The cuVGL node first computes a global localization pose for cuVSLAM to bootstrap localization. After cuVSLAM successfully localizes in the map, cuVGL stops localization and cuVSLAM continuously tracks features and performs optimization with the map.
To run localization with a pre-recorded rosbag, specify the rosbag path in the launch file:
ros2 launch isaac_mapping_ros localize_realsense.launch.py \ map_dir:=<PATH_TO_OUTPUT_FOLDER> \ vgl_model_dir:=<PATH_TO_MODEL_DIR> \ rosbag:=<PATH_TO_BAG>
Replay is at real time by default. You can adjust the replay rate by
replay_rate:=<replay_rate>. When running a short localization bag, usereplay_rate:=0.1to slow down the replay, allowing more localization triggers and increasing the chances of successful localization.
Map Quality Verification#
Pose Plot#
Pose trajectory plots are saved under pose_comparison folder.

The plots show the final poses used for map creation in XY and XZ planes.
The green circle represents the start pose, and the
red square represents the end pose.
If data collection starts and ends at approximately the same pose, the distance between the green circle and the red square represents the pose drifts during mapping.
If you observe noticeable separation between the start and end poses (loop-closure drift), recollect the data in a closed loop and enable multiple passes by setting
-o cuvslam.repeat=2in the map creation command.
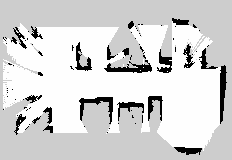
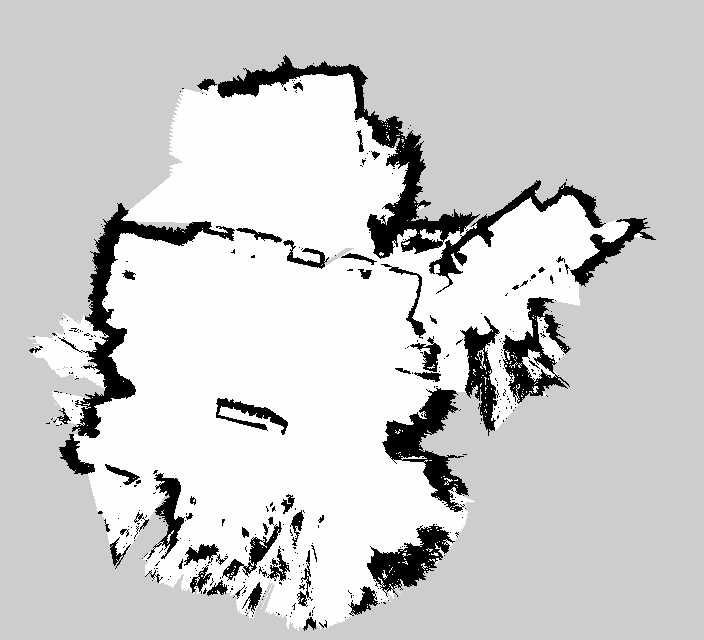
Occupancy Map#
The 2D occupancy map is saved to occupancy_map.png and occupancy_map.yaml in the output map folder. A good occupancy map should have well-aligned objects and walls, for example:

A bad occupancy map can have noisy artifacts or misaligned walls, like this:
You can include objects that are farther away in the occupancy map by increasing the Nvblox integration distance using the
-o nvblox.projective_integrator_max_integration_distance_m=<MAX_INTEGRATION_DISTANCE>flag in the map creation command.
Overriding Parameters#
The map creation configuration is defined in map_creation_config.yaml. You can override the cuVSLAM and Nvblox parameters using one of the following methods:
Pass the overrides as command line arguments, for example:
-o cuvslam.repeat=2 -o nvblox.projective_integrator_max_integration_distance_m=3.5.Create a custom config file by copying the default config file from map_creation_config.yaml and modify the parameters you want to change. Then pass it when running map creation with the
--map_creation_config=<CUSTOM_CONFIG_FILE>flag.