isaac_ros_segformer#
Source code available on GitHub.
Quickstart#
Set Up Development Environment#
Set up your development environment by following the instructions in getting started.
(Optional) Install dependencies for any sensors you want to use by following the sensor-specific guides.
Note
We strongly recommend installing all sensor dependencies before starting any quickstarts. Some sensor dependencies require restarting the development environment during installation, which will interrupt the quickstart process.
Download Quickstart Assets#
Download quickstart data from NGC:
Make sure required libraries are installed.
sudo apt-get install -y curl jq tar
Then, run these commands to download the asset from NGC:
NGC_ORG="nvidia" NGC_TEAM="isaac" PACKAGE_NAME="isaac_ros_segformer" NGC_RESOURCE="isaac_ros_segformer_assets" NGC_FILENAME="quickstart.tar.gz" MAJOR_VERSION=4 MINOR_VERSION=5 VERSION_REQ_URL="https://api.ngc.nvidia.com/v2/resources/$NGC_ORG/$NGC_TEAM/$NGC_RESOURCE/versions" AVAILABLE_VERSIONS=$(curl -s \ -H "Accept: application/json" "$VERSION_REQ_URL") LATEST_VERSION_ID=$(echo $AVAILABLE_VERSIONS | jq -r " .recipeVersions[] | .versionId as \$v | \$v | select(test(\"^\\\\d+\\\\.\\\\d+\\\\.\\\\d+$\")) | split(\".\") | {major: .[0]|tonumber, minor: .[1]|tonumber, patch: .[2]|tonumber} | select(.major == $MAJOR_VERSION and .minor <= $MINOR_VERSION) | \$v " | sort -V | tail -n 1 ) if [ -z "$LATEST_VERSION_ID" ]; then echo "No corresponding version found for Isaac ROS $MAJOR_VERSION.$MINOR_VERSION" echo "Found versions:" echo $AVAILABLE_VERSIONS | jq -r '.recipeVersions[].versionId' else mkdir -p ${ISAAC_ROS_WS}/isaac_ros_assets && \ FILE_REQ_URL="https://api.ngc.nvidia.com/v2/resources/$NGC_ORG/$NGC_TEAM/$NGC_RESOURCE/\ versions/$LATEST_VERSION_ID/files/$NGC_FILENAME" && \ curl -LO --request GET "${FILE_REQ_URL}" && \ tar -xf ${NGC_FILENAME} -C ${ISAAC_ROS_WS}/isaac_ros_assets && \ rm ${NGC_FILENAME} fi
Build isaac_ros_segformer#
Activate the Isaac ROS environment:
isaac-ros activateInstall the prebuilt Debian package:
sudo apt-get update
sudo apt-get install -y ros-jazzy-isaac-ros-segformer
Install Git LFS:
sudo apt-get install -y git-lfs && git lfs install
Clone this repository under
${ISAAC_ROS_WS}/src:cd ${ISAAC_ROS_WS}/src && \ git clone -b release-4.5 https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_image_segmentation.git isaac_ros_image_segmentation
Activate the Isaac ROS environment:
isaac-ros activateUse
rosdepto install the package’s dependencies:sudo apt-get update
rosdep update && rosdep install --from-paths ${ISAAC_ROS_WS}/src/isaac_ros_image_segmentation/isaac_ros_segformer --ignore-src -y
Build the package from source:
cd ${ISAAC_ROS_WS} && \ colcon build --symlink-install --packages-up-to isaac_ros_segformer --base-paths ${ISAAC_ROS_WS}/src/isaac_ros_image_segmentation/isaac_ros_segformer
Source the ROS workspace:
Note
Make sure to repeat this step in every terminal created inside the Isaac ROS environment.
Since this package was built from source, the enclosing workspace must be sourced for ROS to be able to find the package’s contents.
source install/setup.bash
Prepare PeopleSemSegFormer Model#
Open a new terminal and attach to the container.
isaac-ros activateDownload the
PeopleSemSegFormerONNX file:mkdir -p ${ISAAC_ROS_WS}/isaac_ros_assets/models/triton/peoplesemsegformer/1 && \ cd ${ISAAC_ROS_WS}/isaac_ros_assets/models/triton/peoplesemsegformer/1 && \ wget --content-disposition 'https://api.ngc.nvidia.com/v2/models/org/nvidia/team/tao/peoplesemsegformer/deployable_v1.0/files?redirect=true&path=peoplesemsegformer.onnx' -O model.onnx
Convert the ONNX file to a TensorRT plan file:
/usr/src/tensorrt/bin/trtexec --onnx=${ISAAC_ROS_WS}/isaac_ros_assets/models/triton/peoplesemsegformer/1/model.onnx --saveEngine=${ISAAC_ROS_WS}/isaac_ros_assets/models/triton/peoplesemsegformer/1/model.plan
Note
The model conversion time varies across different platforms. On Jetson AGX Thor, the engine conversion process takes ~10-15 minutes to complete.
Copy the sample config file into the Triton model repository:
cp ${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_segformer/peoplesemsegformer_config.pbtxt ${ISAAC_ROS_WS}/isaac_ros_assets/models/triton/peoplesemsegformer/config.pbtxt
Run Launch File#
Continuing inside the Isaac ROS environment, install the following dependencies:
sudo apt-get update
sudo apt-get install -y ros-jazzy-isaac-ros-examples
Run the following launch file to spin up a demo of this package using the quickstart rosbag:
ros2 launch isaac_ros_examples isaac_ros_examples.launch.py launch_fragments:=segformer interface_specs_file:=${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_segformer/quickstart_interface_specs.json model_name:=peoplesemsegformer model_repository_paths:=[${ISAAC_ROS_WS}/isaac_ros_assets/models/triton]
Open another terminal and play the rosbag:
isaac-ros activateros2 bag play -l isaac_ros_assets/isaac_ros_segformer/segformer_sample_data
Ensure that you have already set up your RealSense camera using the RealSense setup tutorial. If you have not, set up the sensor and then restart this quickstart from the beginning.
Continuing inside the Isaac ROS environment, install the following dependencies:
sudo apt-get update
sudo apt-get install -y ros-jazzy-isaac-ros-examples ros-jazzy-isaac-ros-realsense
Run the following launch file to spin up a demo of this package using a RealSense camera:
ros2 launch isaac_ros_examples isaac_ros_examples.launch.py launch_fragments:=realsense_mono_rect,segformer model_name:=peoplesemsegformer model_repository_paths:=[${ISAAC_ROS_WS}/isaac_ros_assets/models/triton]
Ensure that you have already set up your ZED camera using ZED setup tutorial.
Continuing inside the Isaac ROS environment, install dependencies:
sudo apt-get update
sudo apt-get install -y ros-jazzy-isaac-ros-examples ros-jazzy-isaac-ros-image-proc ros-jazzy-isaac-ros-zed
Run the following launch file to spin up a demo of this package using a ZED Camera:
ros2 launch isaac_ros_examples isaac_ros_examples.launch.py \ launch_fragments:=zed_mono_rect,segformer \ model_name:=peoplesemsegformer model_repository_paths:=[${ISAAC_ROS_WS}/isaac_ros_assets/models/triton] \ interface_specs_file:=${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_segformer/zed2_quickstart_interface_specs.json
Note
If you are using the ZED X series, replace zed2_quickstart_interface_specs.json with zedx_quickstart_interface_specs.json in the above command.
Visualize Results#
Open a new terminal inside the Isaac ROS environment:
isaac-ros activateInstall
rqt_image_view:sudo apt-get install -y ros-jazzy-rqt-image-view
Visualize and validate the output of the package by launching
rqt_image_view:ros2 run rqt_image_view rqt_image_view /segformer/colored_segmentation_mask
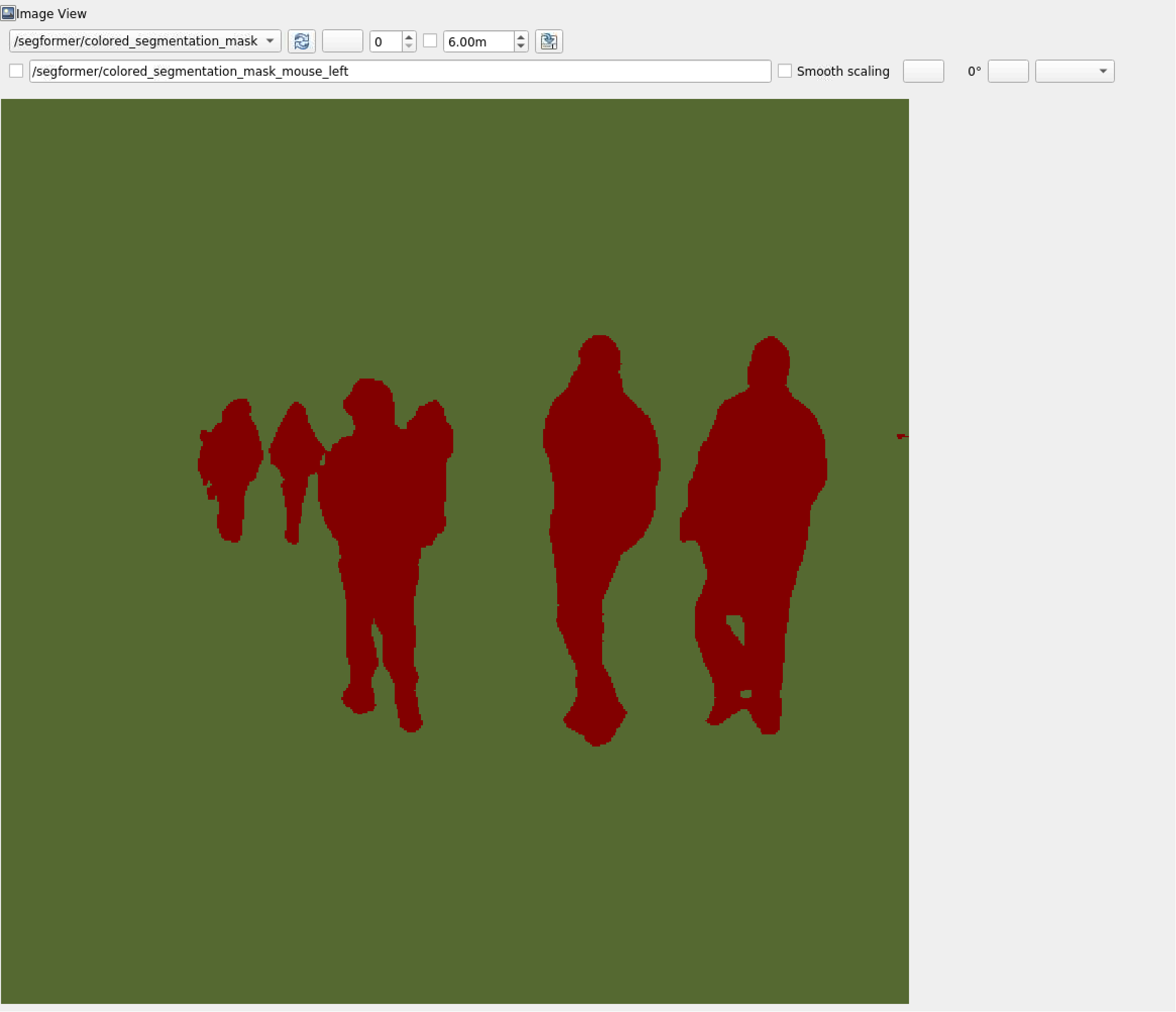
Note
The raw segmentation mask is also published to
/segformer/raw_segmentation_mask. However, the raw pixels correspond to the class labels and so the output is unsuitable for human visual inspection.
Try More Examples#
To continue your exploration, check out the following suggested examples:
Troubleshooting#
Isaac ROS Troubleshooting#
For solutions to problems with Isaac ROS, review here.
Deep Learning Troubleshooting#
For solutions to problems with using DNN models, review here.
API#
Usage#
Two launch files are provided to use this package. The first launch file launches isaac_ros_tensor_rt, whereas another one uses isaac_ros_triton, along with
the necessary components to perform encoding on images and decoding of Segformer’s output. Segformer re-utilizes U-Net decoder for decoding the network output.
Warning
For your specific application, these launch files may need to be modified. Consult the available components to see the configurable parameters.
Launch File |
Components Used |
|---|---|
|
|
|
Note
Isaac ROS Segformer uses UNetDecoderNode for postprocessing and doesn’t have any nodes of its own. Refer Isaac ROS UNet Package for more details.