Isaac ROS DNN Inference#


Overview#
Isaac ROS DNN Inference contains ROS 2 packages for performing DNN inference, providing AI-based perception for robotics applications. DNN inference uses a pre-trained DNN model to ingest an input Tensor and output a prediction to an output Tensor.
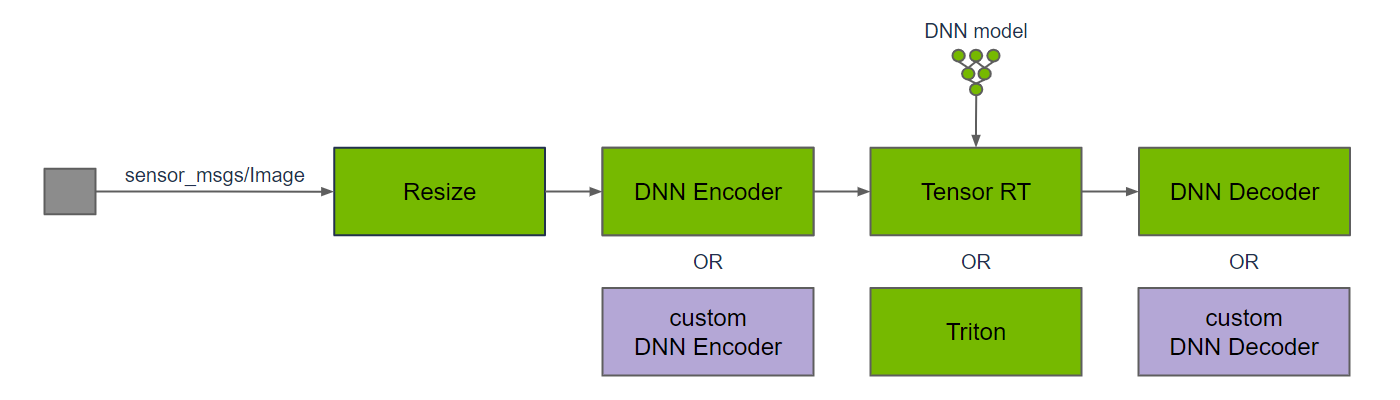
Above is a typical graph of nodes for DNN inference on image data. The input image is resized to match the input resolution of the DNN; the image resolution may be reduced to improve DNN inference performance, which typically scales directly with the number of pixels in the image. DNN inference requires input Tensors, so a DNN encoder node is used to convert from an input image to Tensors, including any data pre-processing that is required for the DNN model. Once DNN inference is performed, the DNN decoder node is used to convert the output Tensors to results that can be used by the application.
TensorRT and Triton are two separate ROS nodes to perform DNN inference. The TensorRT node uses TensorRT to provide high-performance deep learning inference. TensorRT optimizes the DNN model for inference on the target hardware, including Jetson and discrete GPUs. It also supports specific operations that are commonly used by DNN models. For newer or bespoke DNN models, TensorRT may not support inference on the model. For these models, use the Triton node.
The Triton node uses the Triton Inference Server, which provides a compatible frontend supporting a combination of different inference backends (e.g. ONNX Runtime, TensorRT Engine Plan, TensorFlow, PyTorch). In-house benchmark results measure little difference between using TensorRT directly or configuring Triton to use TensorRT as a backend.
Some DNN models may require custom DNN encoders to convert the input data to the Tensor format needed for the model, and custom DNN decoders to convert from output Tensors into results that can be used in the application. Leverage the DNN encoder and DNN decoder nodes for image bounding box detection and image segmentation, or your own custom nodes.
Note
DNN inference can be performed on different types of input data, including audio, video, text, and various sensor data, such as LIDAR, camera, and RADAR. This package provides implementations for DNN encode and DNN decode functions for images, which are commonly used for perception in robotics. The DNNs operate on Tensors for their input, output, and internal transformations, so the input image needs to be converted to a Tensor for DNN inferencing.
Quickstarts#
Isaac ROS NITROS Acceleration#
This package is powered by NVIDIA Isaac Transport for ROS (NITROS), which leverages type adaptation and negotiation to optimize message formats and dramatically accelerate communication between participating nodes.
DNN Models#
To perform DNN inferencing a DNN model is required. NGC provides pre-trained models for use in your robotics application. Using TAO NGC pre-trained models can be fine-tuned for you application. Your own DNN models can be trained directly or download pre-trained models from one of the many model zoo’s available online for use with TensorRT and Triton ROS nodes.
For more details about the setup of TensorRT and Triton, look here.
Use Different Models#
Click here for more information about how to use NGC models.
We also natively support the following packages to perform DNN inference in a variety of contexts:
Package Name |
Use Case |
|---|---|
Deep learned stereo depth estimation |
|
NVIDIA-accelerated, deep learned semantic image segmentation |
|
Deep learning model support for object detection including DetectNet |
|
Deep learned, NVIDIA-accelerated 3D object pose estimation |
Packages#
Supported Platforms#
This package is designed and tested to be compatible with ROS 2 Jazzy running on Jetson, an x86_64 system with an NVIDIA GPU, or a DGX Spark workstation. Other GB10 based platforms may function, but are not part of the test matrix and we cannot guarantee their behavior.
Platform |
Hardware |
Software |
Storage |
Notes |
|---|---|---|---|---|
Jetson |
128+ GB NVMe SSD |
For best performance, ensure that power settings are configured appropriately. |
||
x86_64 |
|
32+ GB disk space available |
||
DGX |
32+ GB disk space available |
For best performance, use the supplied power adapter with the DGX Spark system. |
Isaac ROS Environment#
To simplify development, we strongly recommend leveraging the Isaac ROS CLI by following these steps. This streamlines your development environment setup with the correct versions of dependencies on all supported platforms.
Note
All Isaac ROS Quickstarts, tutorials, and examples have been designed with the Isaac ROS CLI-managed environment as a prerequisite.
Customize your Dev Environment#
To customize your development environment, refer to this guide.
Updates#
Date |
Changes |
|---|---|
2026-04-30 |
Compatibility and integration updates for the Isaac ROS 4.4.0 release |
2026-03-23 |
Introduced early-stage support for SIPL camera framework and LI Eagle stereo CoE/HSB camera with ROS |
2026-02-19 |
Support for DGX Spark and JetPack 7.1 |
2026-02-02 |
Support for two new Docker-optional development and deployment modes |
2025-10-24 |
Support for ROS 2 Jazzy |
2024-12-10 |
Update to be compatible with JetPack 6.1 |
2024-09-26 |
Update for Isaac ROS 3.1 |
2024-05-30 |
Update to be compatible with JetPack 6.0 |
2023-10-18 |
Updated for Isaac ROS 2.0.0 |
2023-05-25 |
Performance improvements |
2023-04-05 |
Source available GXF extensions |
2022-10-19 |
Updated OSS licensing |
2022-08-31 |
Update to be compatible with JetPack 5.0.2 |
2022-06-30 |
Added format string parameter in Triton/TensorRT, switched to NITROS implementation, removed parameters in DNN Image Encoder |
2021-11-03 |
Split DOPE and U-Net into separate repositories |
2021-10-20 |
Initial release |