Tutorial for Freespace Segmentation with Isaac Sim
Overview
This tutorial demonstrates how to use a Isaac Sim and isaac_ros_bi3d_freespace to create a local occupancy grid.
Tutorial Walkthrough
Complete the Isaac ROS Freespace Segmentation quickstart.
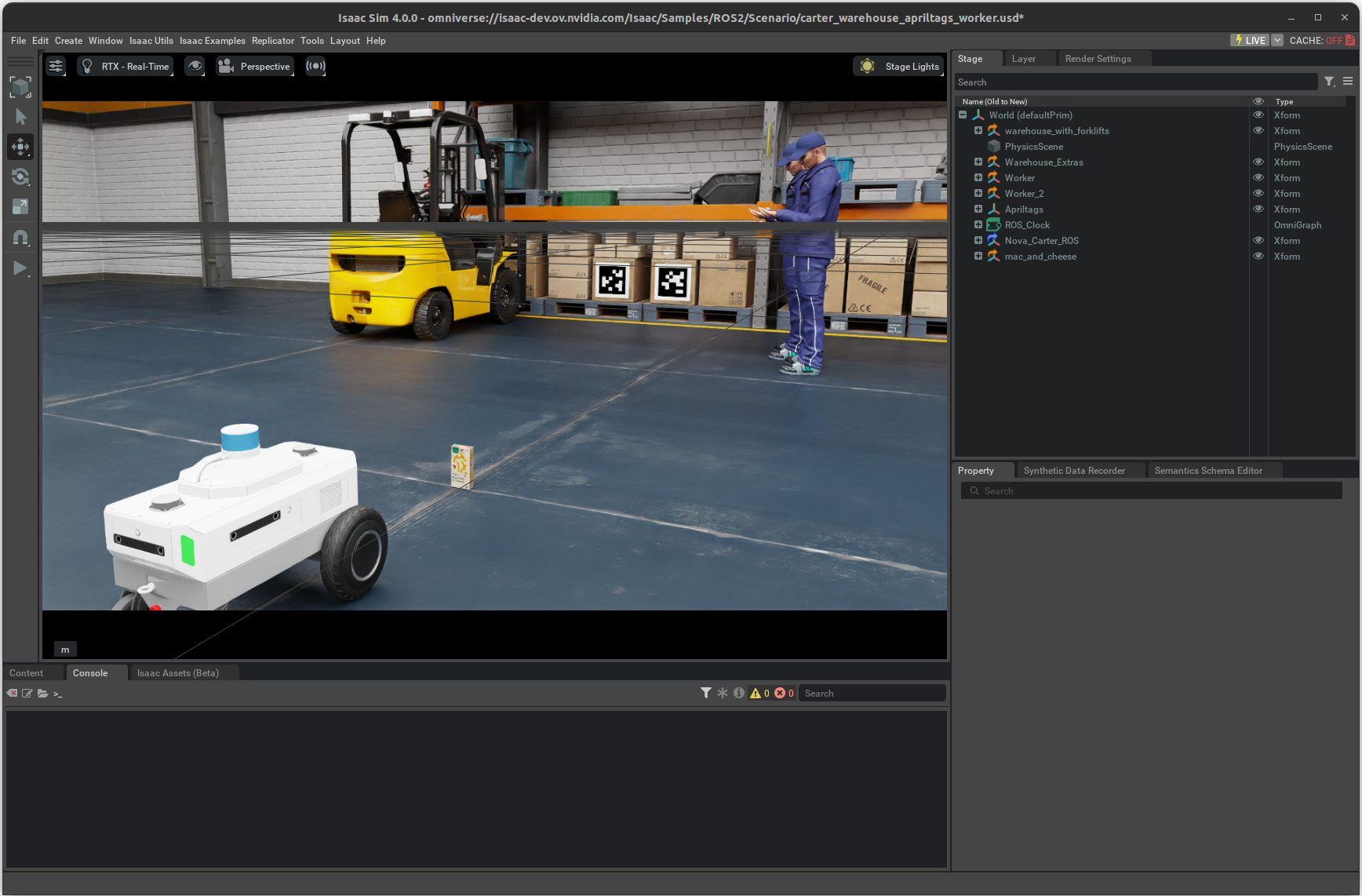
Install and launch Isaac Sim following the steps in the Isaac ROS Isaac Sim Setup Guide
Press Play to start publishing data from Isaac Sim.
Open a second terminal and attach to the container:
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \ ./scripts/run_dev.sh
In the second terminal, start the
isaac_ros_bi3dnode using the launch files:ros2 launch isaac_ros_bi3d_freespace isaac_ros_bi3d_freespace_isaac_sim.launch.py \ featnet_engine_file_path:=${ISAAC_ROS_WS}/isaac_ros_assets/models/bi3d_proximity_segmentation/featnet.plan \ segnet_engine_file_path:=${ISAAC_ROS_WS}/isaac_ros_assets/models/bi3d_proximity_segmentation/segnet.plan \ max_disparity_values:=32
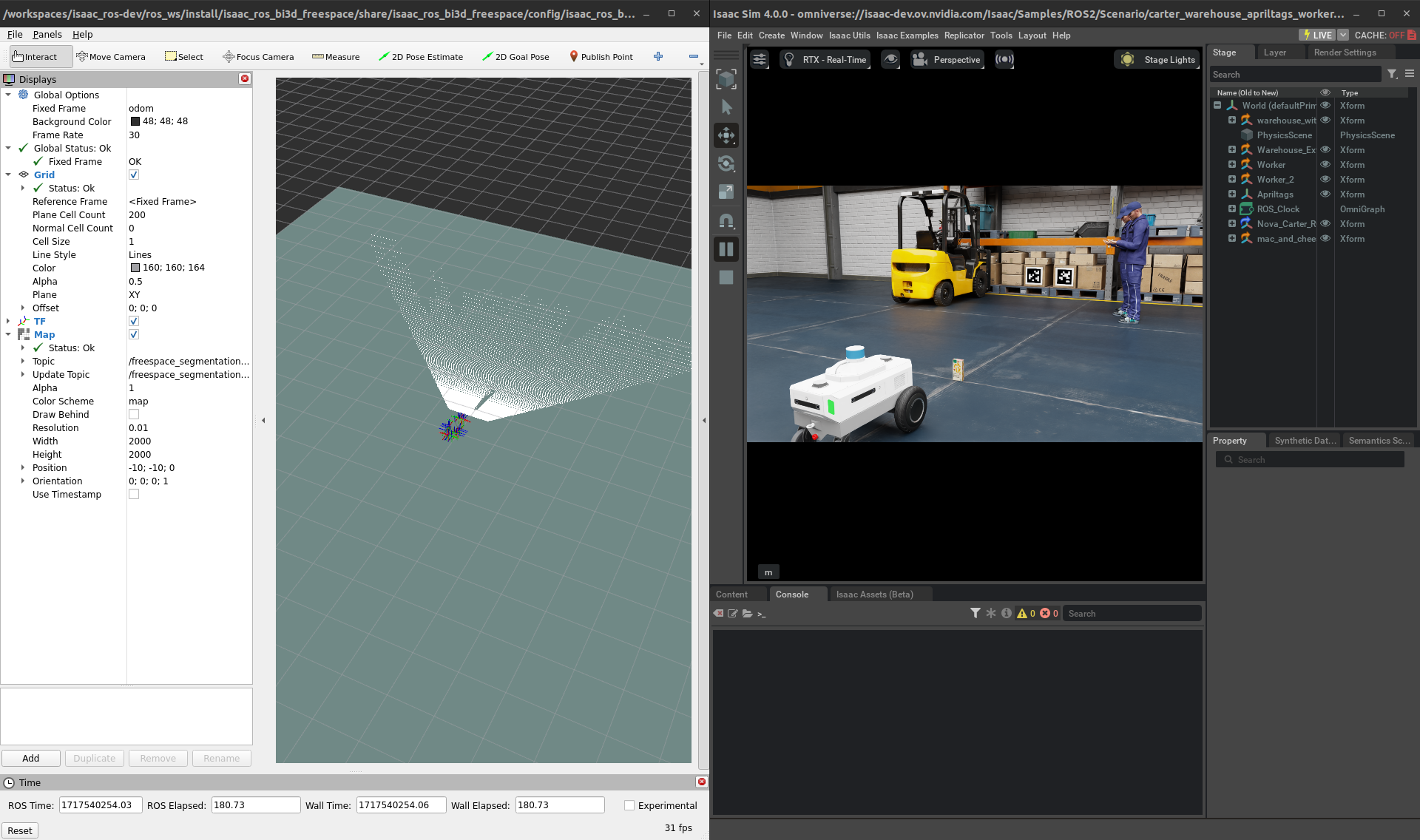
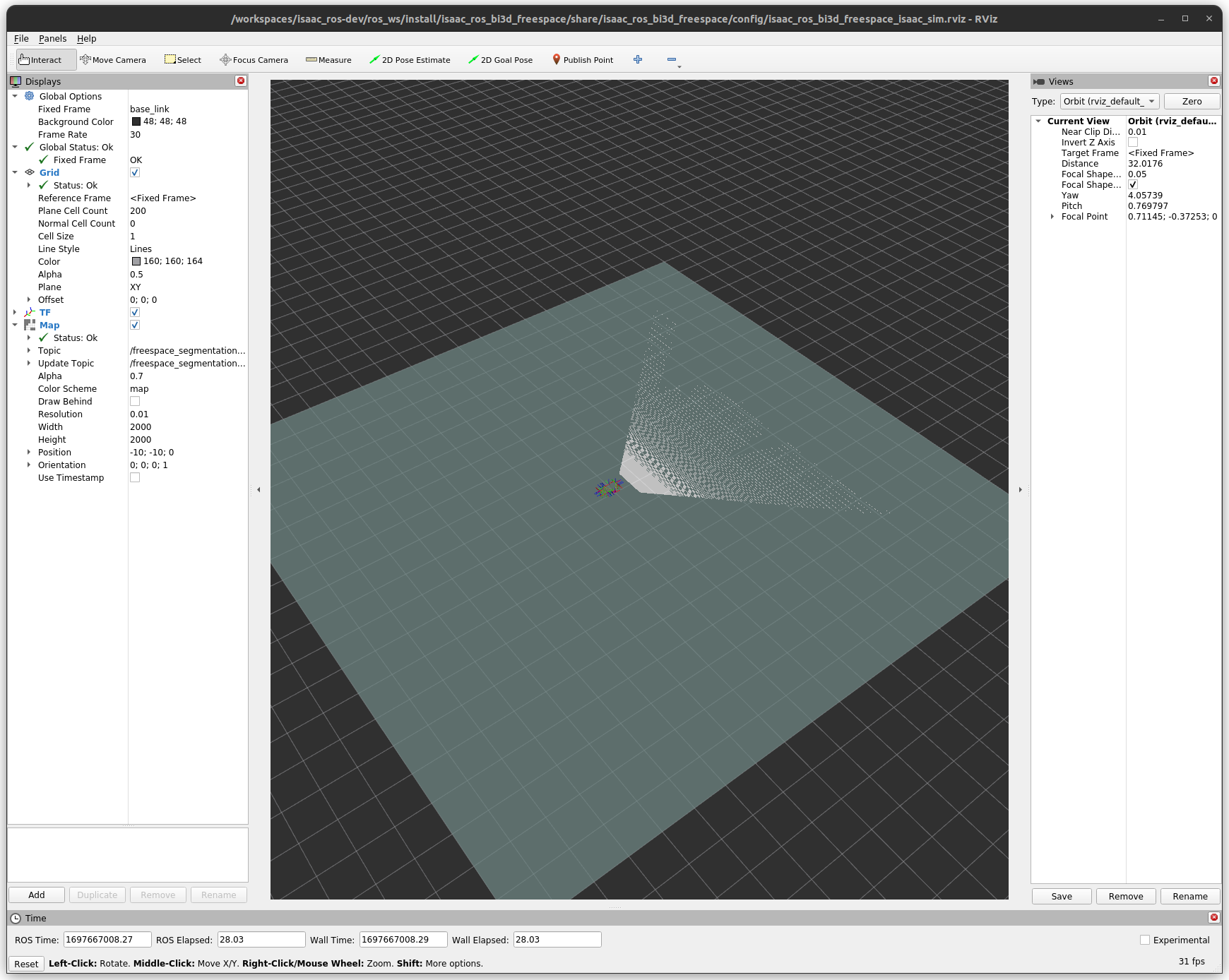
You should see a RViz window, as shown below:
Optionally, you can run the visualizer script to visualize the disparity image:
ros2 run isaac_ros_bi3d isaac_ros_bi3d_visualizer.py --disparity_topic bi3d_mask
