Isaac ROS RealSense Setup
Camera Compatibility
RealSense Model |
Supported? |
|---|---|
D455 |
✓ |
D435i |
✓ |
D415 |
✗ |
Note
It is required to use RealSense firmware version 5.13.0.50, librealsense SDK version 2.55.1 and realsense-ros driver version 4.51.1-isaac. Any deviation from these versions will break Isaac ROS examples.
Note
The correct versions of the librealsense SDK and the realsense-ros driver are automatically installed in the docker container when specifying the RealSense image key as explained in the Setup Instructions.
Note
For best results we suggest increasing the maximum Linux kernel receive buffer size as detailed here.
Note
The realsense-viewer tool has performance issues when running multiple cameras on the Jetson platforms. However the RealSense ROS drivers work fine with multiple cameras.
Setup Instructions
Note
This tutorial assumes that you have completed the instructions in Developer Environment Setup.
Plug in your RealSense camera before launching the Docker container in the next step.
Clone
isaac_ros_commonunder${ISAAC_ROS_WS}/src.cd ${ISAAC_ROS_WS}/src && \ git clone -b release-3.2 https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_common.git isaac_ros_common
Configure the container created by
isaac_ros_common/scripts/run_dev.shto include RealSense packages. To accomplish this, create the.isaac_ros_common-configfile in theisaac_ros_common/scriptsdirectory, then run the following to modify theCONFIG_IMAGE_KEYto includelibrealsense SDKandrealsense-rosin Isaac ROS Dev Docker:
cd ${ISAAC_ROS_WS}/src/isaac_ros_common/scripts && \ touch .isaac_ros_common-config && \ echo CONFIG_IMAGE_KEY=ros2_humble.realsense > .isaac_ros_common-config
Launch the Docker container:
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \ ./scripts/run_dev.sh -d ${ISAAC_ROS_WS}This rebuilds the container image using
Dockerfile.realsensein one of its layered stages. Rebuilding can take several minutes.
After the container image is rebuilt and you are inside the container, you can run
realsense-viewerto verify that the RealSense camera is connected.
Note
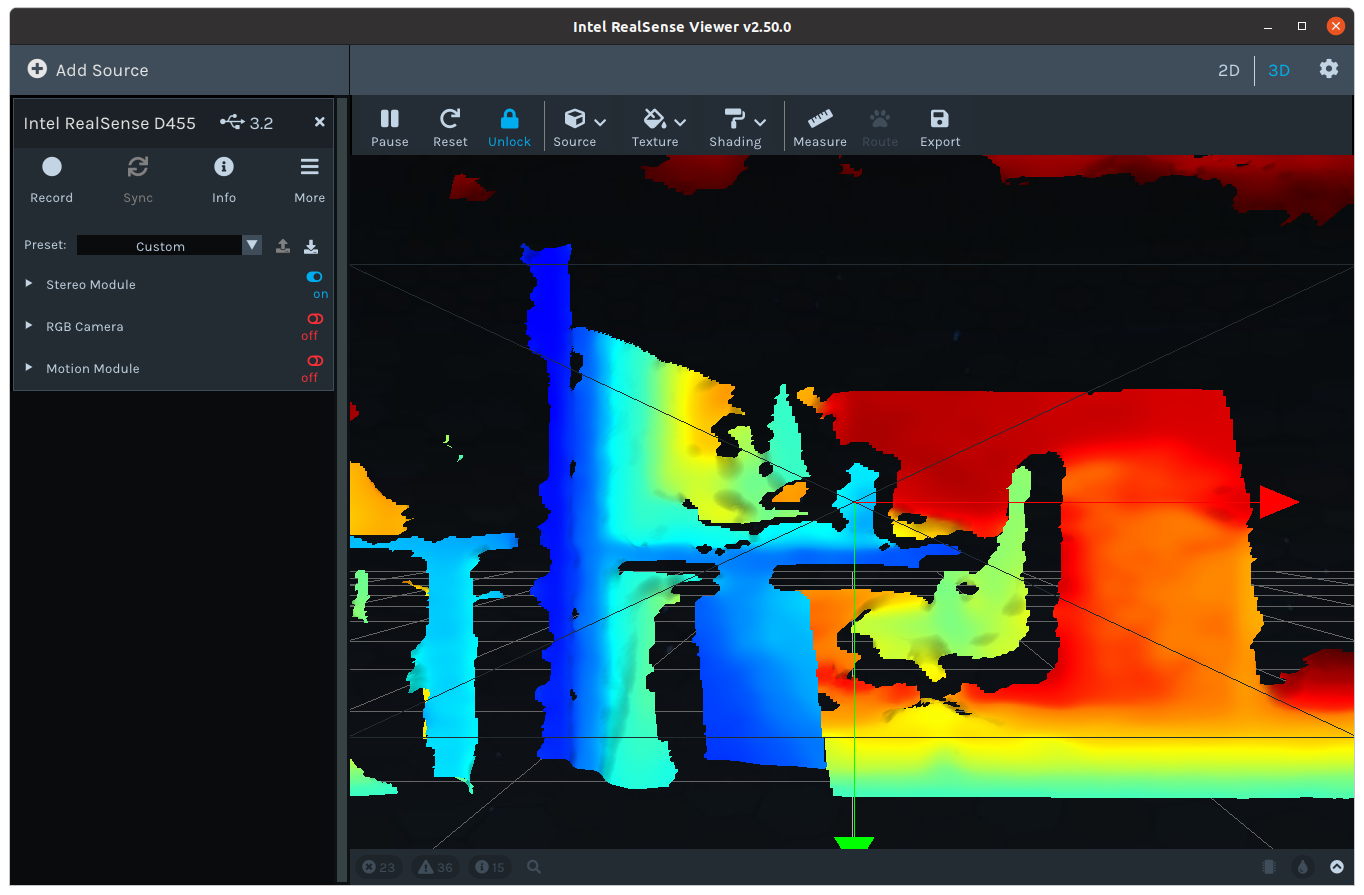
The
realsense-viewertool requires a graphical environment, to use it you must connect the host to a monitor, use a remote desktop connection or similar.realsense-viewerIf you turn on the “Stereo Module” in the GUI, you should see something like the following: