FoundationPose Tracking#
Overview#
This tutorial walks you through a graph to run FoundationPose tracking using FoundationPose FoundationPose tracking has similar functionality as FoundationPose pose estimation. However, it utilizes the pose from the previous frame and requires only the refine network without batching which can significantly increase the speed of the pipeline. Therefore, you can use the FoundationPose pose estimation to obtain the initial pose on the first frame and then switch to FoundationPose tracking for subsequent frames.
Note
To ensure the tracking pipeline is able to get the initial pose estimation, play the rosbag after the launch file is fully started.
Tutorial Walkthrough#
Complete the Isaac ROS FoundationPose Quickstart Guide.
Download tracking rosbag from NGC:
Make sure required libraries are installed.
sudo apt-get install -y curl jq tarThen, run these commands to download the asset from NGC:
NGC_ORG="nvidia" NGC_TEAM="isaac" PACKAGE_NAME="isaac_ros_foundationpose" NGC_RESOURCE="isaac_ros_foundationpose_assets" NGC_FILENAME="foundationpose_tracking.tar.gz" MAJOR_VERSION=4 MINOR_VERSION=5 VERSION_REQ_URL="https://api.ngc.nvidia.com/v2/resources/$NGC_ORG/$NGC_TEAM/$NGC_RESOURCE/versions" AVAILABLE_VERSIONS=$(curl -s \ -H "Accept: application/json" "$VERSION_REQ_URL") LATEST_VERSION_ID=$(echo $AVAILABLE_VERSIONS | jq -r " .recipeVersions[] | .versionId as \$v | \$v | select(test(\"^\\\\d+\\\\.\\\\d+\\\\.\\\\d+$\")) | split(\".\") | {major: .[0]|tonumber, minor: .[1]|tonumber, patch: .[2]|tonumber} | select(.major == $MAJOR_VERSION and .minor <= $MINOR_VERSION) | \$v " | sort -V | tail -n 1 ) if [ -z "$LATEST_VERSION_ID" ]; then echo "No corresponding version found for Isaac ROS $MAJOR_VERSION.$MINOR_VERSION" echo "Found versions:" echo $AVAILABLE_VERSIONS | jq -r '.recipeVersions[].versionId' else mkdir -p ${ISAAC_ROS_WS}/isaac_ros_assets && \ FILE_REQ_URL="https://api.ngc.nvidia.com/v2/resources/$NGC_ORG/$NGC_TEAM/$NGC_RESOURCE/\ versions/$LATEST_VERSION_ID/files/$NGC_FILENAME" && \ curl -LO --request GET "${FILE_REQ_URL}" && \ tar -xf ${NGC_FILENAME} -C ${ISAAC_ROS_WS}/isaac_ros_assets && \ rm ${NGC_FILENAME} fi
Open a new terminal and activate the Isaac ROS environment:
isaac-ros activate
Continuing inside the container, install the following dependencies:
sudo apt-get update
sudo apt-get install -y ros-jazzy-isaac-ros-examples
Run the following launch files to spin up a demo of this package:
Launch
isaac_ros_foundationpose:ros2 launch isaac_ros_examples isaac_ros_examples.launch.py launch_fragments:=foundationpose_tracking interface_specs_file:=${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_foundationpose/quickstart_interface_specs.json mesh_file_path:=${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_foundationpose/Mustard/textured_simple.obj score_engine_file_path:=${ISAAC_ROS_WS}/isaac_ros_assets/models/foundationpose/score_trt_engine.plan refine_engine_file_path:=${ISAAC_ROS_WS}/isaac_ros_assets/models/foundationpose/refine_trt_engine.plan rt_detr_engine_file_path:=${ISAAC_ROS_WS}/isaac_ros_assets/models/synthetica_detr/sdetr_grasp.plan
Then open another terminal, and activate the Isaac ROS environment:
isaac-ros activateThen, play the rosbag:
ros2 bag play -l ${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_foundationpose/foundationpose_tracking.bag/
Ensure that you have already set up your RealSense camera using the RealSense setup tutorial. If you have not, set up the sensor and then restart this quickstart from the beginning.
Complete the Isaac ROS RT-DETR tutorial.
Open a new terminal and activate the Isaac ROS environment:
isaac-ros activateInstall the following dependencies:
sudo apt-get update
sudo apt-get install -y ros-jazzy-isaac-ros-examples ros-jazzy-isaac-ros-realsense
Place the object in front of the camera and run the launch file:
ros2 launch isaac_ros_examples isaac_ros_examples.launch.py launch_fragments:=realsense_mono_rect_depth,foundationpose_tracking mesh_file_path:=${ISAAC_ROS_WS}/isaac_ros_assets/isaac_ros_foundationpose/Mac_and_cheese_0_1/Mac_and_cheese_0_1.obj score_engine_file_path:=${ISAAC_ROS_WS}/isaac_ros_assets/models/foundationpose/score_trt_engine.plan refine_engine_file_path:=${ISAAC_ROS_WS}/isaac_ros_assets/models/foundationpose/refine_trt_engine.plan rt_detr_engine_file_path:=${ISAAC_ROS_WS}/isaac_ros_assets/models/synthetica_detr/sdetr_grasp.plan
Visualize Results#
Open a new terminal inside the Isaac ROS environment:
isaac-ros activateInstall RViz:
sudo apt-get install -y ros-jazzy-rviz2 source /opt/ros/jazzy/setup.bash
Launch
RViz2to visualize the outputrviz2 -d $(ros2 pkg prefix isaac_ros_foundationpose --share)/rviz/foundationpose_tracking.rviz
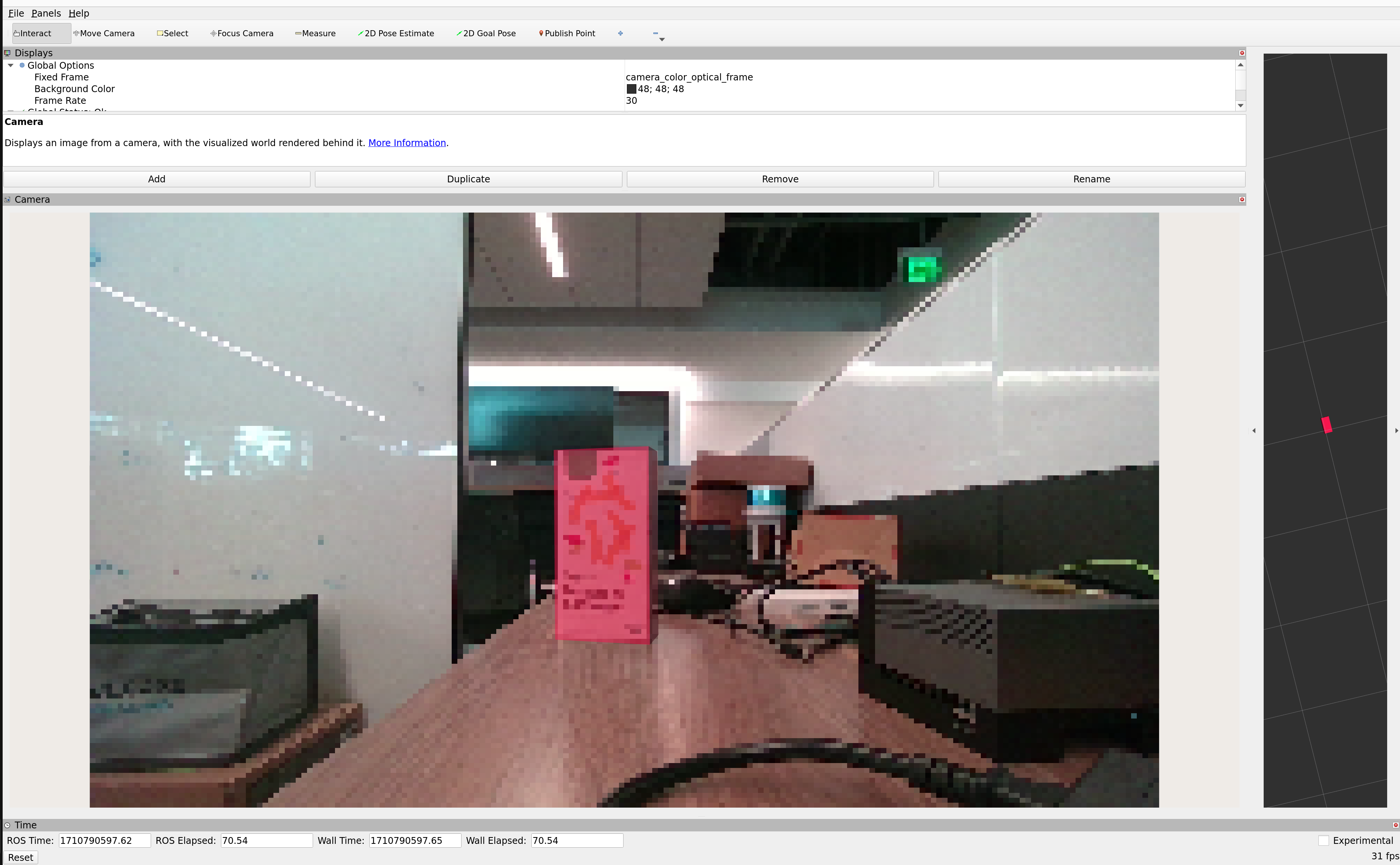
You should see a
RViz2window open as shown below showing the 3D bounding box overlaid over the input image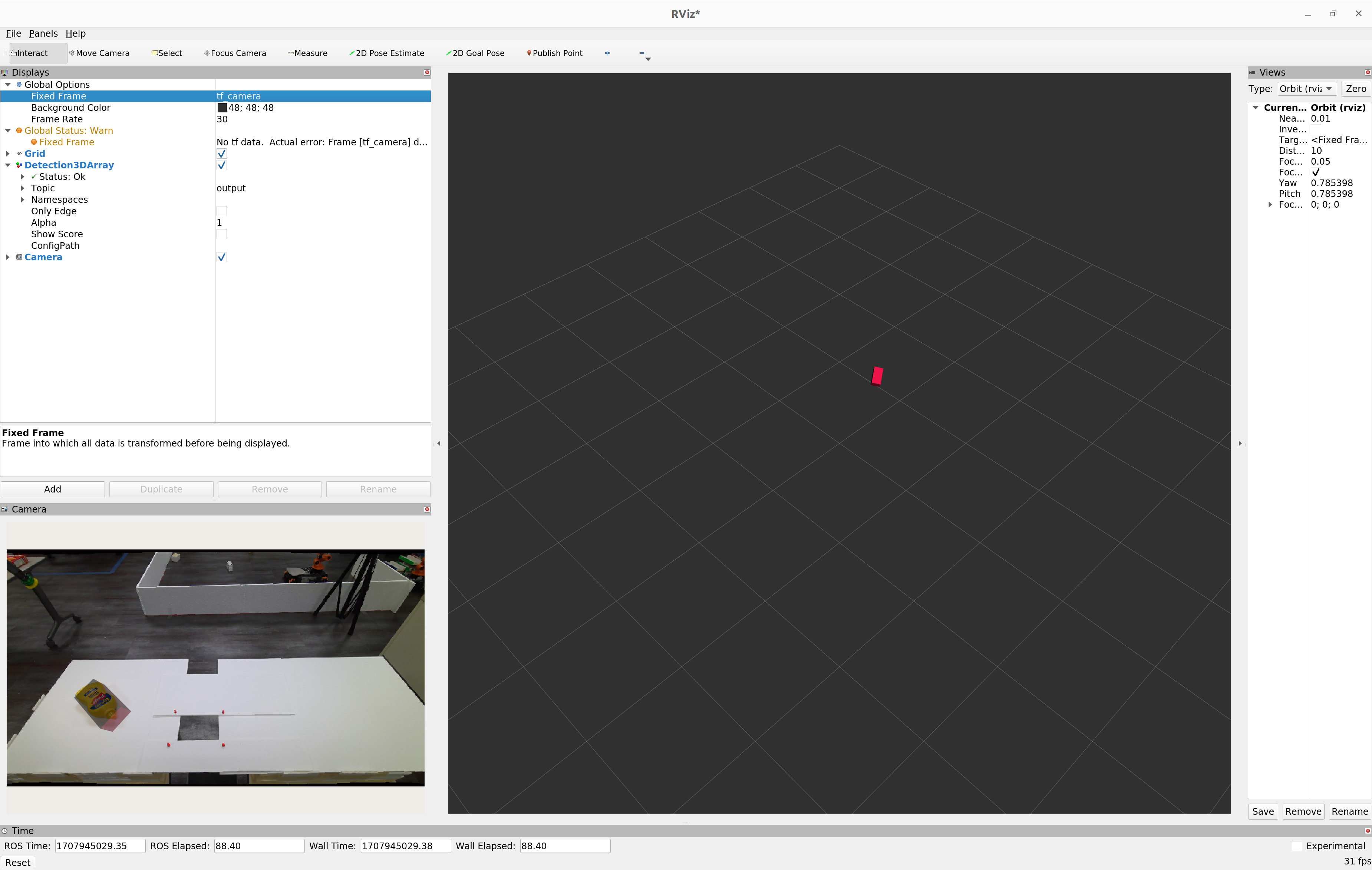
Launch
RViz2to visualize the outputrviz2 -d $(ros2 pkg prefix isaac_ros_foundationpose --share)/rviz/foundationpose_realsense_tracking.rviz
You should see a visualization of the 3D pose estimate as shown below: