Tutorial for DNN Stereo Depth Estimation Using a RealSense Camera
Overview
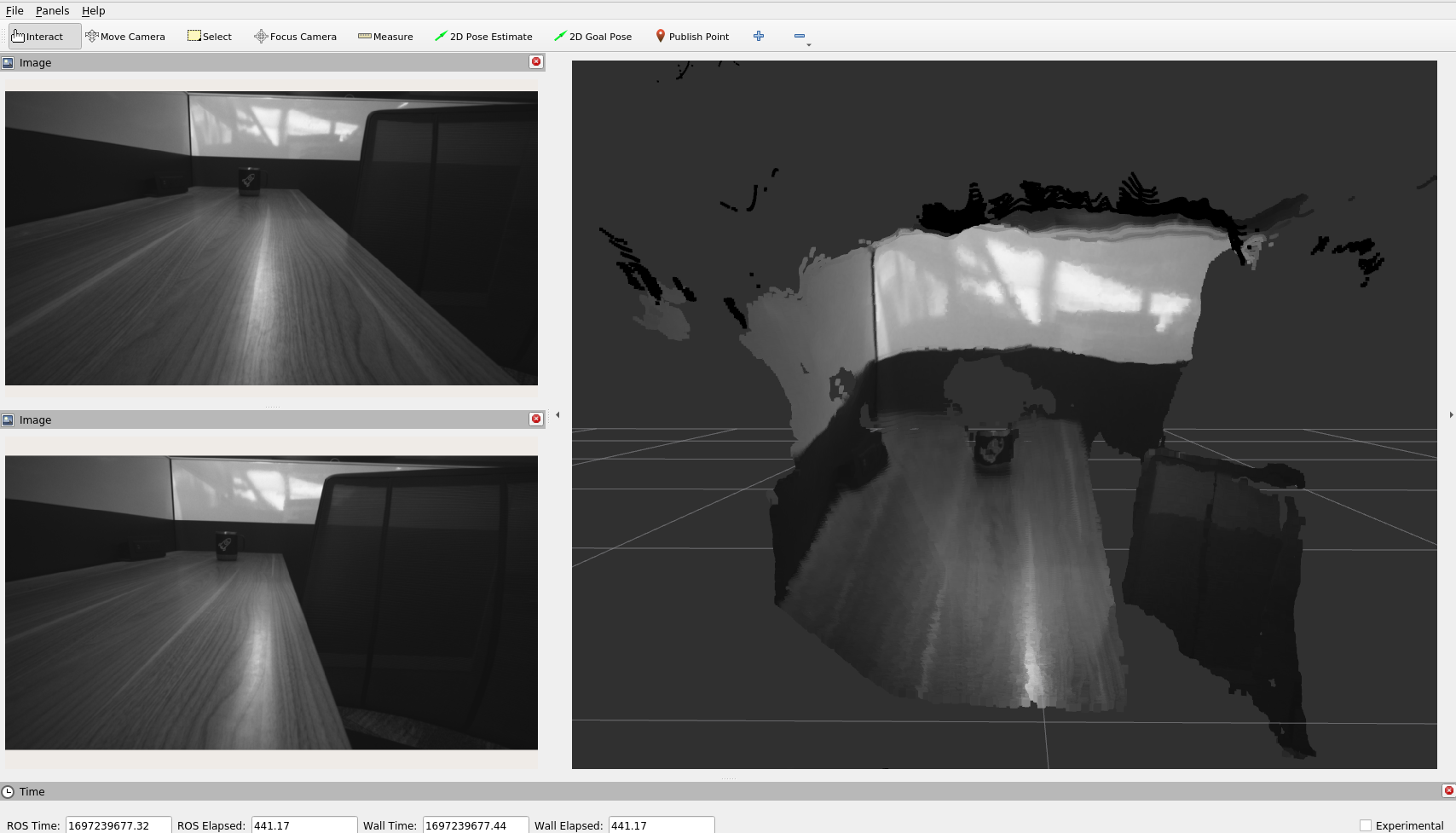
This tutorial demonstrates how to perform stereo-camera-based reconstruction using a RealSense camera and isaac_ros_ess.
Note
This tutorial requires a compatible RealSense camera from the list of available cameras
Tutorial Walkthrough
Complete the realsense setup tutorial.
Complete steps 1-2 and 4-6 as described in the ESS Quickstart Guide.
Open a new terminal and launch the Docker container using the
run_dev.shscript:cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \ ./scripts/run_dev.sh
Build and source the workspace:
cd /workspaces/isaac_ros-dev && \ colcon build --symlink-install && \ source install/setup.bash
Run the launch file, which launches the example and waits for 10 seconds:
ros2 launch isaac_ros_ess isaac_ros_ess_realsense.launch.py engine_file_path:=/workspaces/isaac_ros-dev/src/isaac_ros_dnn_stereo_depth/resources/ess.engine threshold:=0.8