Attention
As of June 30, 2025, the Isaac ROS Buildfarm for Isaac ROS 2.1 on Ubuntu 20.04 Focal is no longer supported.
Due to an isolated infrastructure event, all ROS 2 Humble Debian packages that were previously built for Ubuntu 20.04 are no longer available in the Isaac Apt Repository. All artifacts for Isaac ROS 3.0 and later are built and maintained with a more robust pipeline.
Users are encouraged to migrate to the latest version of Isaac ROS. The source code for Isaac ROS 2.1
continues to be available on the release-2.1 branches of the Isaac ROS
GitHub repositories.
The original documentation for Isaac ROS 2.1 is preserved below.
Tutorial with Isaac Sim

Overview
This tutorial demonstrates how to perform depth-camera based
reconstruction using the disparity_node and stereo image pairs
streamed from Isaac Sim.
Tutorial Walkthrough
Complete steps 1-4 listed from the quickstart.
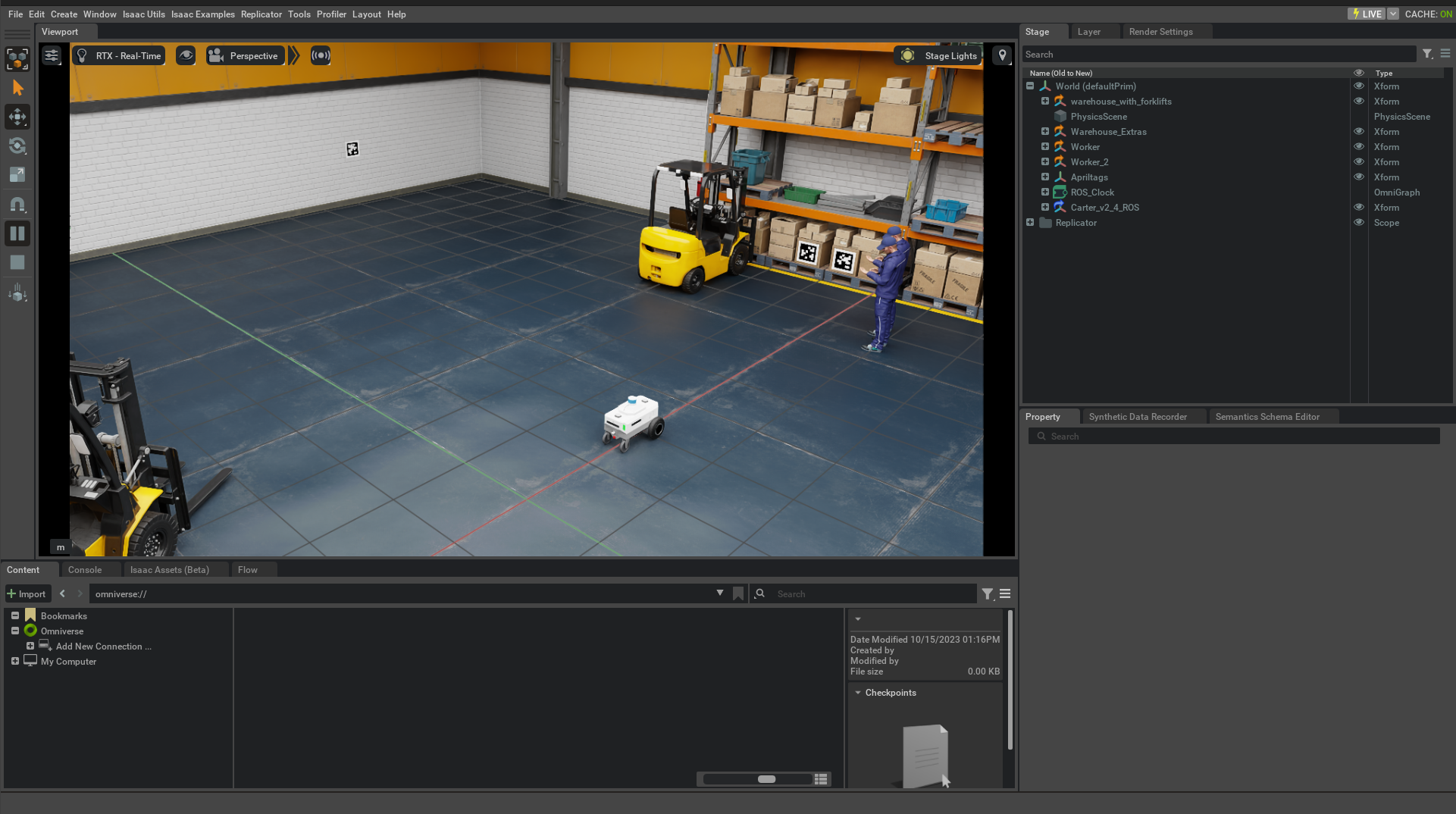
Install and launch Isaac Sim following the steps in the Isaac ROS Isaac Sim Setup Guide.
Press Play to start publishing data from the Isaac Sim.
In a separate terminal, start the
isaac_ros_stereo_image_procgraph using the launch files:ros2 launch isaac_ros_stereo_image_proc isaac_ros_stereo_image_pipeline_isaac_sim.launch.py
You should see a RViz window, as shown below: