Attention
As of June 30, 2025, the Isaac ROS Buildfarm for Isaac ROS 2.1 on Ubuntu 20.04 Focal is no longer supported.
Due to an isolated infrastructure event, all ROS 2 Humble Debian packages that were previously built for Ubuntu 20.04 are no longer available in the Isaac Apt Repository. All artifacts for Isaac ROS 3.0 and later are built and maintained with a more robust pipeline.
Users are encouraged to migrate to the latest version of Isaac ROS. The source code for Isaac ROS 2.1
continues to be available on the release-2.1 branches of the Isaac ROS
GitHub repositories.
The original documentation for Isaac ROS 2.1 is preserved below.
Object Detection
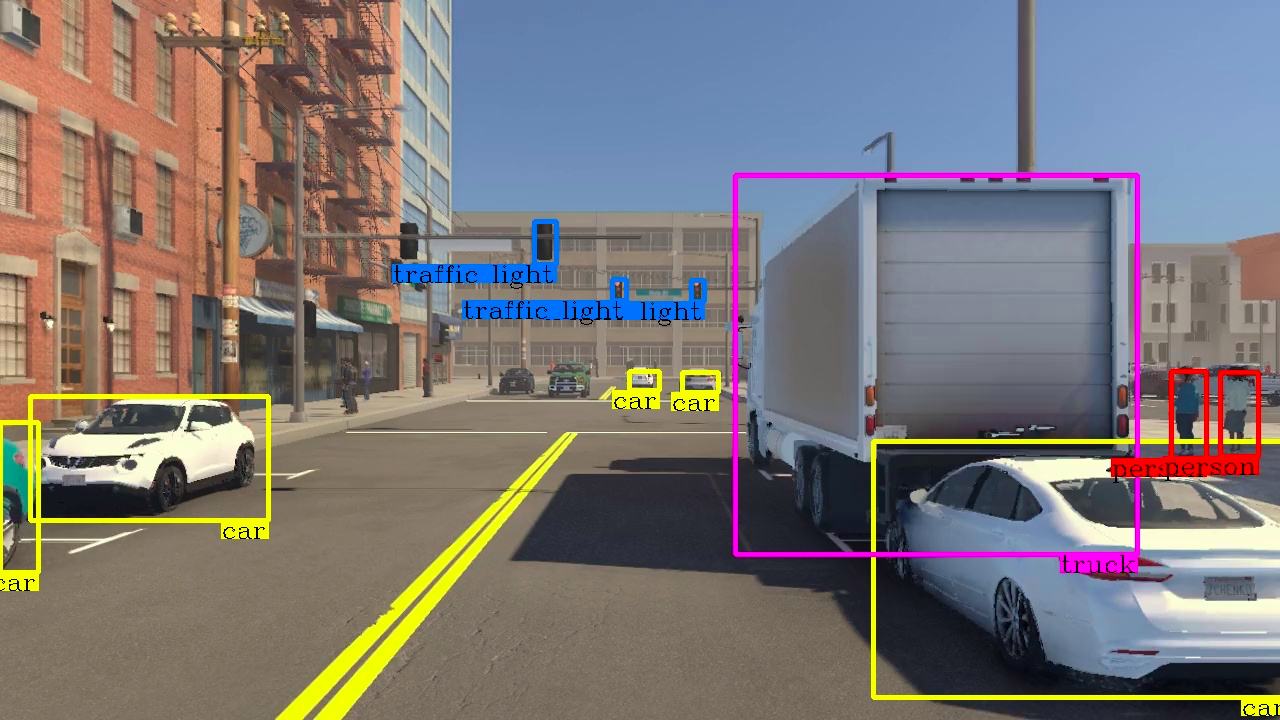
Robotics applications need to detect and localize where objects are in a scene in order to react intelligently to their presence. Object detection finds bounding boxes in pixel coordinates of target objects in a single monocular camera image.
While classical computer vision algorithms have been somewhat successful in object detection, deep learned models trained on real examples with correct bounding boxes have changed the game. DNN architectures such as DetectNetV2 and YOLOv8 are world-class at detecting people, common objects, machine parts, or anything needed for the task at hand.