Attention
As of June 30, 2025, the Isaac ROS Buildfarm for Isaac ROS 2.1 on Ubuntu 20.04 Focal is no longer supported.
Due to an isolated infrastructure event, all ROS 2 Humble Debian packages that were previously built for Ubuntu 20.04 are no longer available in the Isaac Apt Repository. All artifacts for Isaac ROS 3.0 and later are built and maintained with a more robust pipeline.
Users are encouraged to migrate to the latest version of Isaac ROS. The source code for Isaac ROS 2.1
continues to be available on the release-2.1 branches of the Isaac ROS
GitHub repositories.
The original documentation for Isaac ROS 2.1 is preserved below.
Isaac ROS AprilTag ros1_bridge Tutorial
Overview
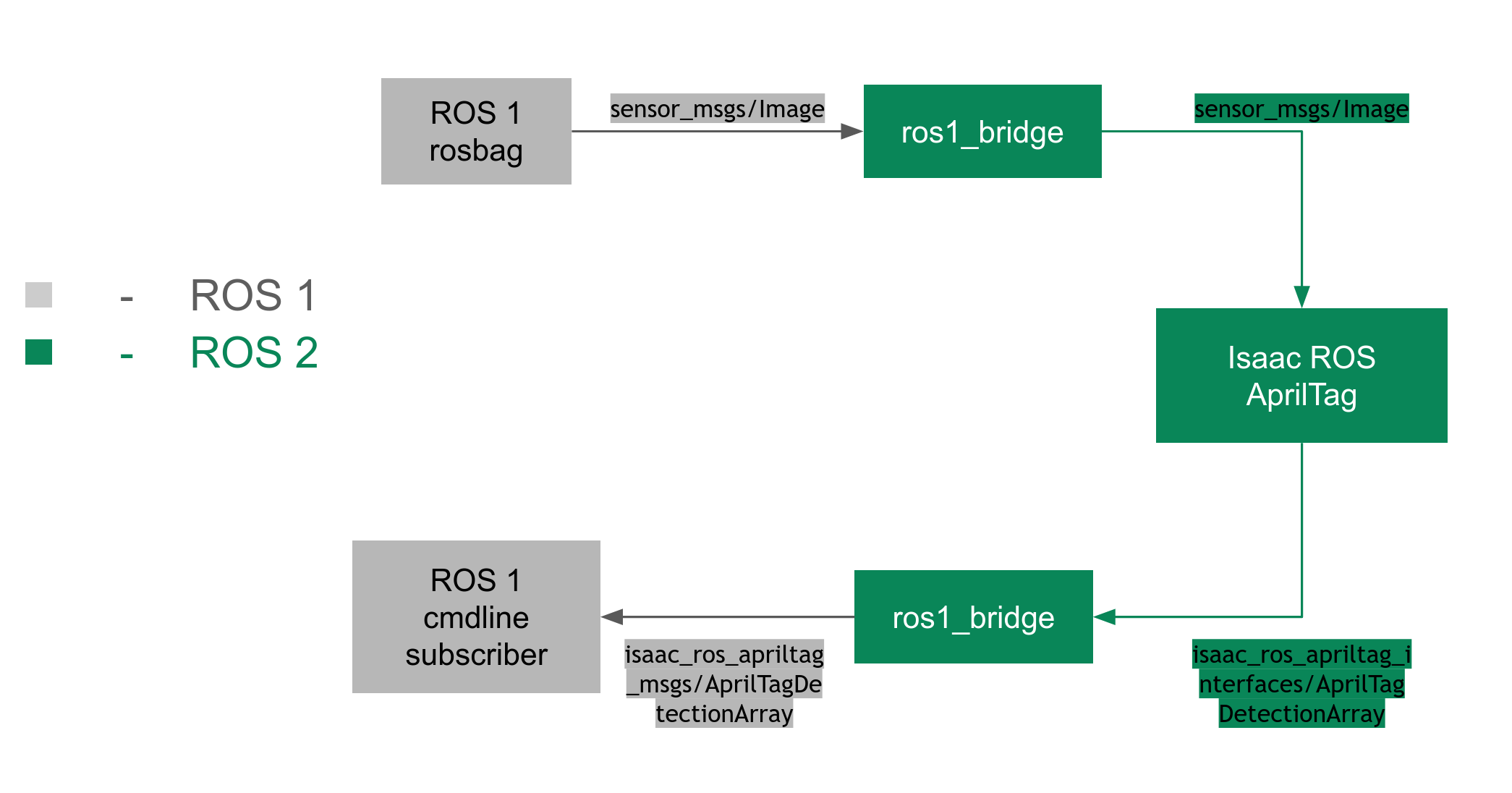
This tutorial walks you through a graph to estimate the 6DOF pose of AprilTags
using isaac_ros_apriltag running ROS 2 and a ROS 1 rosbag containing images.
The image data will be published from the ROS 1 bag and sent to ROS 2
for computation and the tag detections result will be visualized in ROS 1 using the command line
rostopic echo tool.
Tutorial Walkthrough
Complete the quickstart here.
Complete the Isaac ROS ros1_bridge Setup Guide.
Pull down a ROS 1 rosbag of sample data:
cd $ISAAC_ROS_WS/src/isaac_ros_apriltag && \ git lfs pull -X "" -I "resources/rosbags/ros1_bridge_apriltag.bag"
Launch the Docker container using the
run_dev.shscript:cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \ ./scripts/run_dev.sh ${HOME}/workspaces
There is currently a bug that causes a .catkin file to be generated by the
ros2_humblebuild which uses the –merge-install flag. So manually remove the .catkin file:sudo rm /opt/ros/humble/install/.catkin
Note
You will have to remove this file every time a new Isaac ROS docker container is created. But you do not have to do this step when attaching to an already running Docker container
Inside the container, build the ROS 2 workspace expect
ros1_bridge:source /opt/ros/humble/setup.bash && \ cd /workspaces/isaac_ros-dev/isaac_ros-dev && \ colcon build --symlink-install --packages-skip ros1_bridge
Attach a second terminal to the container:
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \ ./scripts/run_dev.sh ${HOME}/workspaces
Note
Do NOT close the first terminal when you attach this second terminal to the container.
Inside the container, build and source the workspace:
source isaac_ros_1-dev/install_isolated/setup.bash && \ source isaac_ros-dev/install/setup.bash && \ cd /workspaces/isaac_ros-dev/isaac_ros-dev && \ colcon build --symlink-install --packages-select ros1_bridge --cmake-force-configure && \ source install/setup.bash && \ export ROS_MASTER_URI=http://localhost:11311 && \ ros2 run ros1_bridge dynamic_bridge --bridge-all-topics
Attach a third terminal to the container:
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \ ./scripts/run_dev.sh ${HOME}/workspaces
Note
Do NOT close the first terminal when you attach this second terminal to the container.
Source
ros1_noeticand runroscore:source /opt/ros/noetic/setup.bash && \ roscore
Attach a fourth terminal to the Docker container:
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \ ./scripts/run_dev.sh ${HOME}/workspaces
Play the ROS1 rosbag in a loop:
source /opt/ros/noetic/setup.bash && \ cd /workspaces/isaac_ros-dev/isaac_ros-dev/src/isaac_ros_apriltag/resources/rosbags && \ rosbag play -l ros1_bridge_apriltag.bag
Attach a fifth terminal to the Docker container:
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \ ./scripts/run_dev.sh ${HOME}/workspaces
Run the
isaac_ros_apriltagnode:cd /workspaces/isaac_ros-dev/isaac_ros-dev && \ source install/setup.bash && \ ros2 launch isaac_ros_apriltag isaac_ros_apriltag.launch.py
Attach a sixth terminal to the Docker container:
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \ ./scripts/run_dev.sh ${HOME}/workspaces
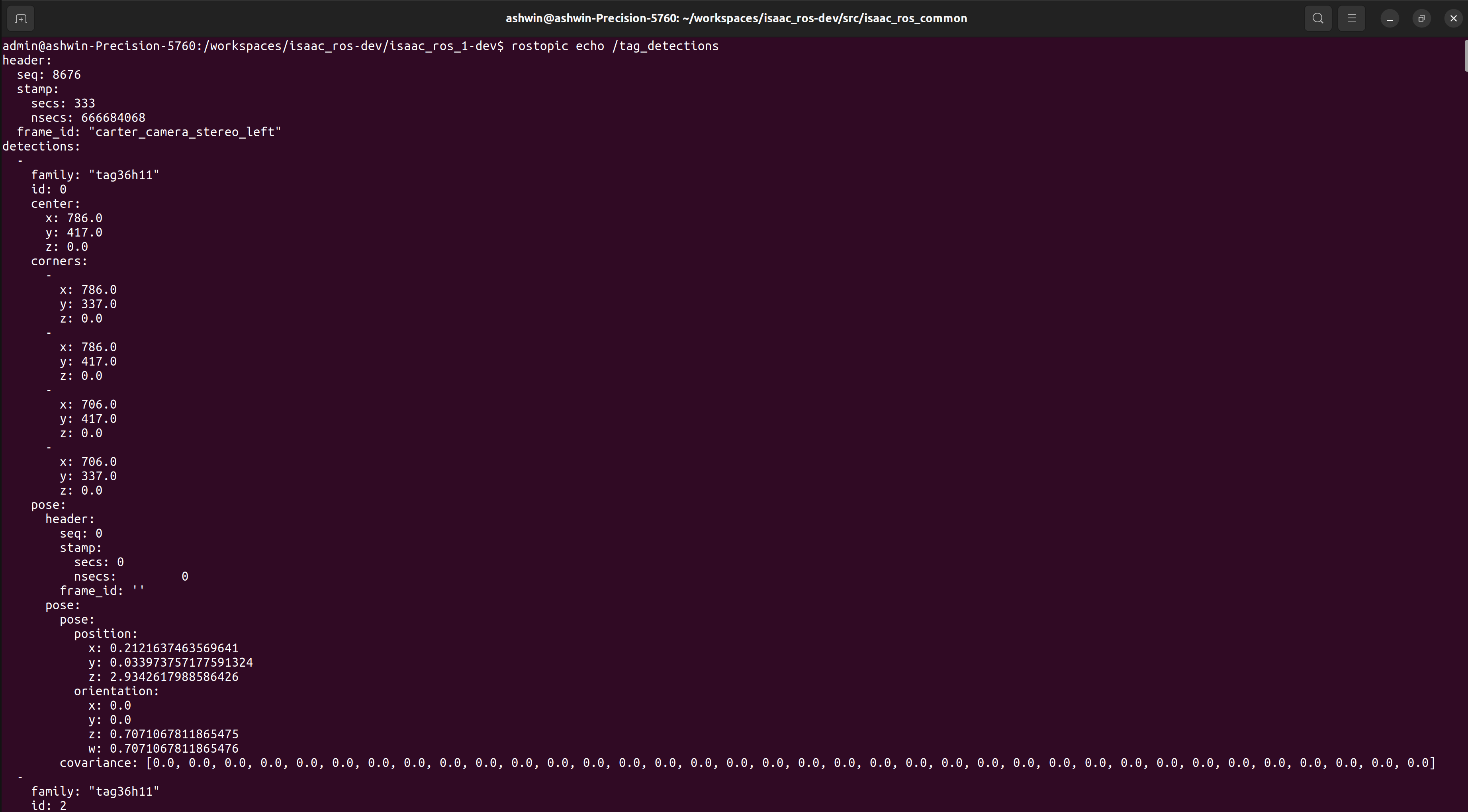
Use
rostopic echoto print the tag detections in ROS 1 :cd /workspaces/isaac_ros-dev/isaac_ros_1-dev && \ source install_isolated/setup.bash && \ rostopic echo /tag_detections