isaac_ros_occupancy_grid_localizer
Source code on GitHub.
Quickstart
Set up your development environment by following these instructions.
Clone
isaac_ros_commonand this repository under${ISAAC_ROS_WS}/src.cd ${ISAAC_ROS_WS}/src
git clone https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_common.git
git clone https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_map_localization.git
Pull down a ROS bag of sample data:
cd ${ISAAC_ROS_WS}/src/isaac_ros_map_localization && \ git lfs pull -X "" -I "**/rosbags/"
Launch the Docker container using the
run_dev.shscript:cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \ ./scripts/run_dev.sh
Install this package’s dependencies.
sudo apt-get install -y ros-humble-isaac-ros-occupancy-grid-localizer
Run
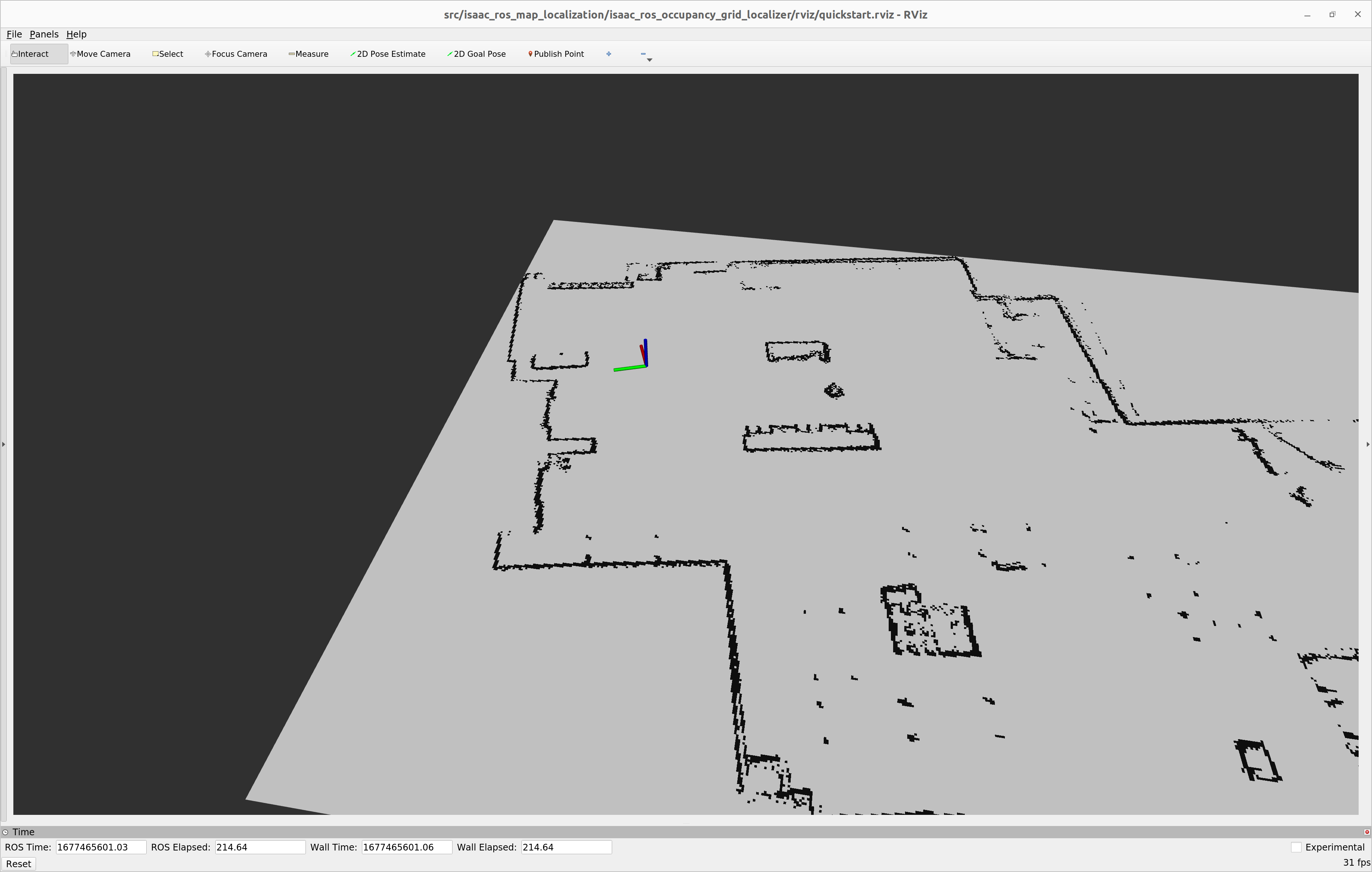
rviz2:rviz2 -d src/isaac_ros_map_localization/isaac_ros_occupancy_grid_localizer/rviz/quickstart.rviz
Create another terminal in the Docker container using the
run_dev.shscript:cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \ ./scripts/run_dev.sh
Run the launch file to spin up a demo of this package:
ros2 launch isaac_ros_occupancy_grid_localizer isaac_ros_occupancy_grid_localizer_quickstart.launch.py
Create another terminal in the Docker container using the
run_dev.shscript:cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \ ./scripts/run_dev.sh
Run the rosbag:
ros2 bag play -l src/isaac_ros_map_localization/isaac_ros_occupancy_grid_localizer/data/rosbags/flatscan
Create another terminal in the docker container using the
run_dev.shscript:cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \ ./scripts/run_dev.sh
Trigger the localization using a command line service call :
ros2 service call trigger_grid_search_localization std_srvs/srv/Empty {}
You should see a frame being generated in the map showing the position of the LIDAR.
Try More Examples
To continue your exploration, check out the following suggested examples:
Troubleshooting
Isaac ROS Troubleshooting
For solutions to problems with Isaac ROS, please check here.
API
Usage
ros2 launch isaac_ros_occupancy_grid_localizer isaac_ros_occupancy_grid_localizer.launch.py
Note
Use the flatscan topic with the
trigger_grid_search_localization service to trigger localization
using a service.
Or publish directly to the flatscan_localization topic to
trigger localization every time a FlatScan message is received on
this topic.
Do not publish FlatScan messages to both flatscan and
flatscan_localization topics.
ROS Parameters
Note
The ROS parameter names are the same as the Nav2
map_server
YAML parameters. This allows to load and pass the same YAML file to both Nav2 and
isaac_ros_occupancy_grid_localizer as shown in the
Isaac Sim Launch File
ROS Parameter |
Type |
Default |
Description |
|---|---|---|---|
|
|
|
frame_id of localization result |
|
|
|
The meters per pixel of the |
|
|
|
The origin of the map loaded. Used to transform the output to compensate for the same transform made to the PNG file loaded by the Nav2 map_server. |
|
|
|
Pixels with occupancy probability greater than this threshold are considered completely occupied. This parameter is loaded from the the map YAML file. Supported values: |
|
|
|
Name of the PNG file used to load map. This should be in the same directory as the map YAML file specified in |
|
|
|
Absolute path to the map YAML file. From which we load the |
|
|
|
Maximum number of points in FlatScan Message that can be received used to pre-allocate GPU memory. |
|
|
|
The radius of the robot. This parameter is used to exclude poses which are too close to an obstacle.memory. |
|
|
|
The minimal output error used to normalize and compute confidence, if output error from best sample smaller or equal to this, the confidence is 1 |
|
|
|
The max output error from our best sample, if output error larger than this threshold, we conclude localization failed |
|
|
|
The maximum beam error used when comparing range scans. |
|
|
|
The GPU accelerated scan-and-match function can only handle a certain number of beams per range scan. The allowed values are {32, 64, 128, 256, 512}. If the number of beams in the range scan does not match this number a subset of beams will be taken. |
|
|
|
This is the number of scans to collect into a batch for the GPU kernel. Choose a value which matches your GPU well. |
|
|
|
Distance between sample points in meters. The smaller this number, the more sample poses will be considered. This leads to a higher accuracy and lower performance. |
|
|
|
Points range larger than this threshold will be marked as out of range and not used. |
|
|
|
Points range smaller than this threshold will be marked as invalid and not used. |
|
|
|
Minimal required scan FoV to run the localizer. |
|
|
|
Whether or not pick the closest angle beam in angle bucket, if not pick the average within an angular bucket |
ROS Topics Subscribed
ROS Topic |
Type |
Description |
|---|---|---|
|
The input FlatScan messages buffer. The last message on this topic will be used as input for localization when the |
|
|
The topic to trigger localization directly without a buffer. Localization will be triggered every time a FlatScan message is received on this topic. |
ROS Topic |
Interface |
Description |
|---|---|---|
|
Pose of the scan data with respect to the map origin, as specified in the first note in the overview section |
ROS Services Advertised
ROS Service |
Interface |
Description |
|---|---|---|
|
The service to trigger the global localization using the last scan received on the |