As of June 30, 2025, the Isaac ROS Buildfarm for Isaac ROS 2.1 on Ubuntu
20.04 Focal is no longer supported.
Due to an isolated infrastructure event, all ROS 2 Humble Debian packages
that were previously built for Ubuntu 20.04 are no longer available in the
Isaac Apt Repository. All artifacts for Isaac ROS 3.0 and later are built
and maintained with a more robust pipeline.
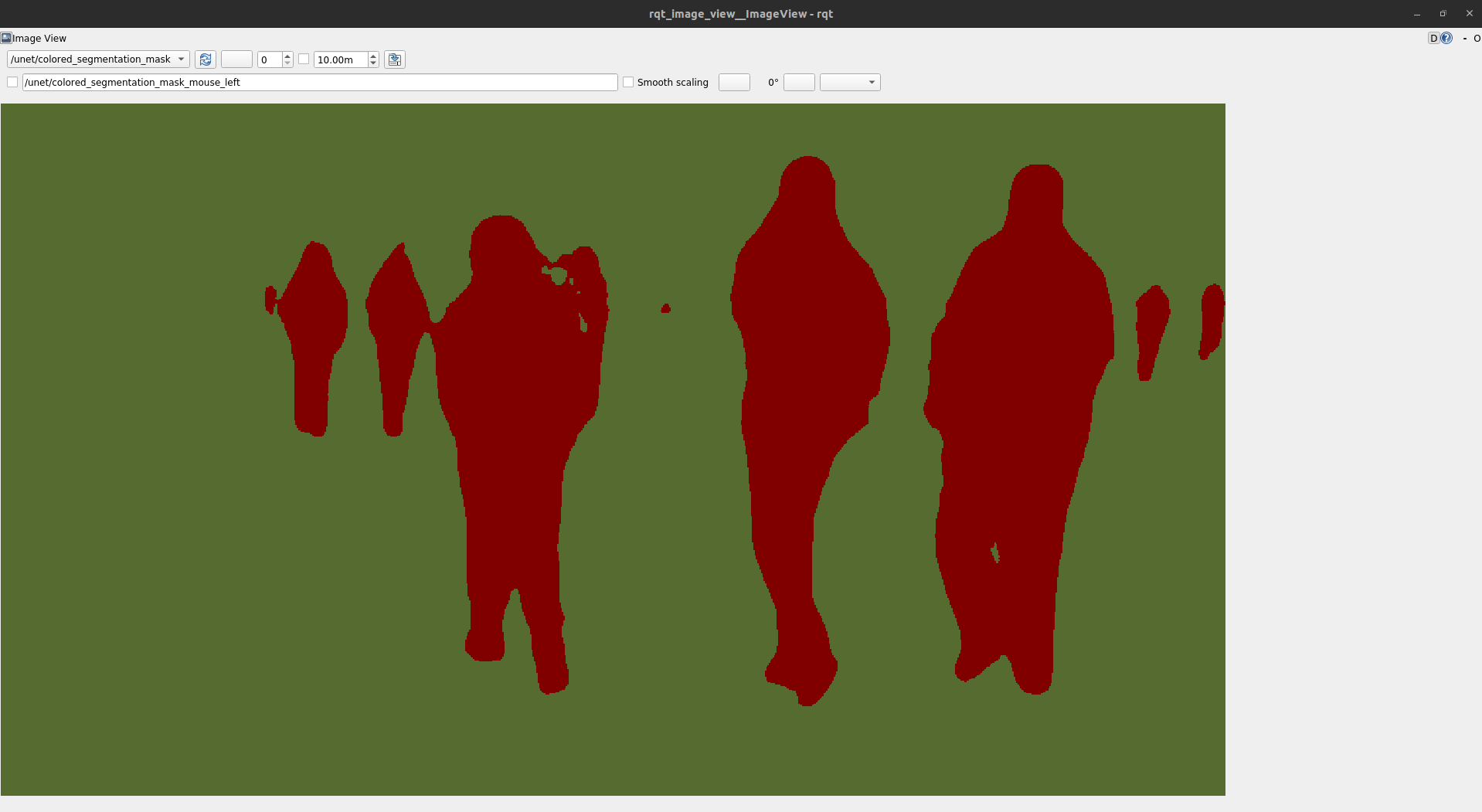
Visualize and validate the output of the package by launching rqt_image_view in another terminal: In a third terminal, enter the Docker container again:
Then inside the rqt_image_view GUI, change the topic to /unet/colored_segmentation_mask to view a colorized segmentation mask.
Note
The raw segmentation mask is also published to /unet/raw_segmentation_mask. However, the raw pixels correspond to the class labels and so the output is unsuitable for human visual inspection.
Three launch files are provided to use this package. The first launch file launches isaac_ros_tensor_rt, whereas another one uses isaac_ros_triton, along with
the necessary components to perform encoding on images and decoding of U-Net’s output. The final launch file launches an Argus-compatible camera
with a rectification node, along with the components found in isaac_ros_unet_triton.launch.py.
A more comprehensive tutorial featuring the third launch file can be found here.
Warning
For your specific application, these launch files may need to be modified. Please consult the available components to see
the configurable parameters.
The image encoding of the colored segmentation mask. Supported values: rgb8, bgr8
color_palette
int64_tlist
[]
Vector of integers where each element represents the RGB color hex code for the corresponding class label. The number of elements should equal the number of classes. E.g. [0xFF0000,0x76b900]
network_output_type
string
softmax
The type of output that the network provides. Supported values: softmax, argmax, sigmoid
mask_width
int16_t
960
The width of the segmentation mask.
mask_height
int16_t
544
The height of the segmentation mask.
Warning
Note: the model output should be NCHW or NHWC. In this context, the C refers to the class.
Note: For the network_output_type, the softmax and sigmoid option expects a single 32 bit floating point tensor. For the argmax option, a single signed 32 bit integer tensor is expected.
Note: Models with greater than 255 classes are currently not supported. If a class label greater than 255 is detected, this mask will be downcast to 255 in the raw segmentation.