isaac_ros_nvblox
Source code on GitHub.
A meta-package containing the relevant nvblox ROS 2 packages.
Quickstart
Complete the Developer Environment Setup.
Clone
isaac_ros_commonand this repository under${ISAAC_ROS_WS}/src.cd ${ISAAC_ROS_WS}/src
git clone https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_common.git
git clone --recurse-submodules https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_nvblox.git && \ cd isaac_ros_nvblox && git lfs pull
Pull down a ROS Bag of sample data:
cd ${ISAAC_ROS_WS}/src/isaac_ros_nvblox && \ git lfs pull -X "" -I "nvblox_ros/test/test_cases/rosbags/nvblox_pol"
Launch the Docker container using the
run_dev.shscript:cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \ ./scripts/run_dev.sh ${ISAAC_ROS_WS}
Inside the container, install package-specific dependencies via
rosdep:cd /workspaces/isaac_ros-dev/ && \ rosdep install -i -r --from-paths src --rosdistro humble -y --skip-keys "libopencv-dev libopencv-contrib-dev libopencv-imgproc-dev python-opencv python3-opencv nvblox"
Build and source the workspace:
cd /workspaces/isaac_ros-dev && \ colcon build --symlink-install && \ source install/setup.bash
(Optional) Run tests to verify complete and correct installation:
colcon test --executor sequential
In a current terminal inside the Docker container, run the launch file for Nvblox with
nav2:source /workspaces/isaac_ros-dev/install/setup.bash && \ ros2 launch nvblox_examples_bringup isaac_sim_example.launch.py
Open a second terminal inside the docker container:
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \ ./scripts/run_dev.sh ${ISAAC_ROS_WS}
In the second terminal, play the ROS Bag:
ros2 bag play src/isaac_ros_nvblox/nvblox_ros/test/test_cases/rosbags/nvblox_pol
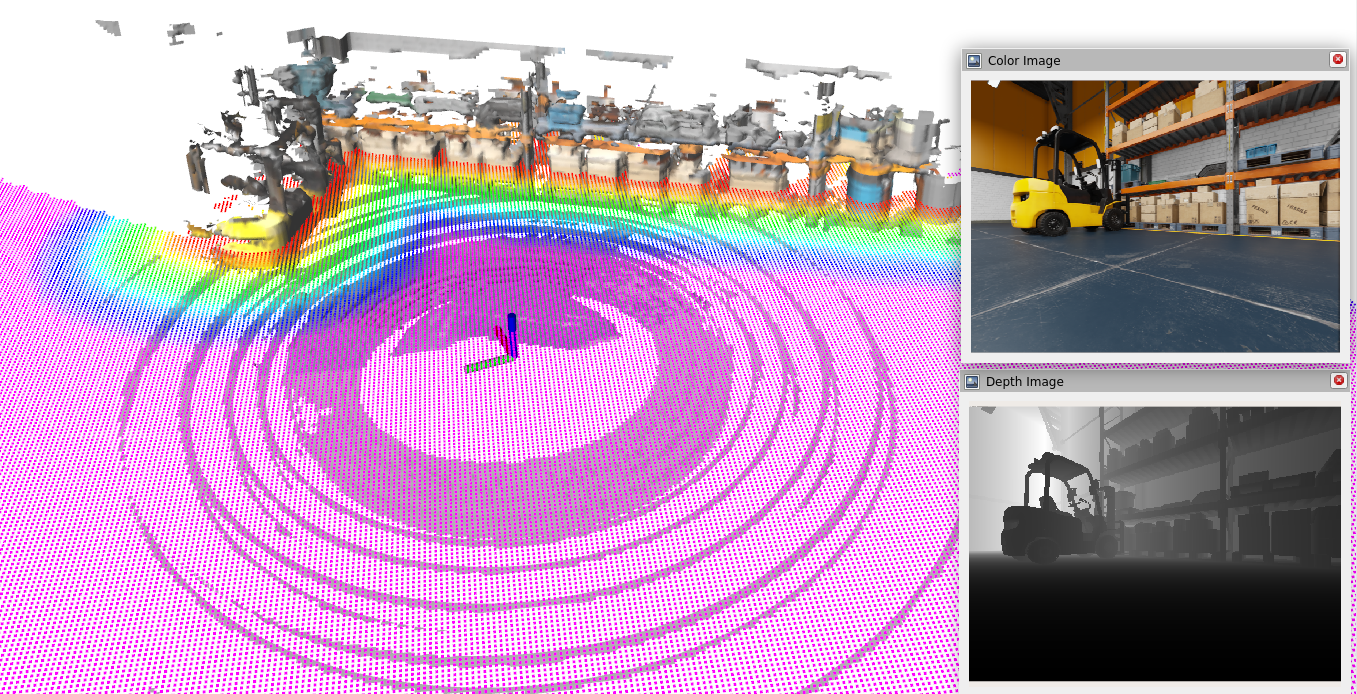
You should see the robot reconstructing a mesh, with the 2d ESDF slice overlaid on top.
Try More Examples
To continue your exploration, check out the following suggested nvblox examples:
Launch file |
Arguments |
Description |
|---|---|---|
|
|
Example to run with Isaac Sim (tutorial) |
|
|
Example to run with Isaac Sim including human reconstruction (tutorial) |
|
|
Example to run with Isaac Sim including general dynamic reconstruction (tutorial) |
|
|
Example to run with a RealSense camera (tutorial) |
|
|
Example to run with a RealSense camera including human reconstruction (tutorial) |
|
|
Example to run with a RealSense camera including general dynamic reconstruction (tutorial) |
|
|
Record RealSense data to replay with the above examples (tutorial) |
|
|
Example to run with a ZED camera (tutorial) |