Attention
As of June 30, 2025, the Isaac ROS Buildfarm for Isaac ROS 2.1 on Ubuntu 20.04 Focal is no longer supported.
Due to an isolated infrastructure event, all ROS 2 Humble Debian packages that were previously built for Ubuntu 20.04 are no longer available in the Isaac Apt Repository. All artifacts for Isaac ROS 3.0 and later are built and maintained with a more robust pipeline.
Users are encouraged to migrate to the latest version of Isaac ROS. The source code for Isaac ROS 2.1
continues to be available on the release-2.1 branches of the Isaac ROS
GitHub repositories.
The original documentation for Isaac ROS 2.1 is preserved below.
Example Usage of Isaac ROS Depth Segmentation
This example uses the Isaac ROS Depth Segmentation, which includes monitoring the forward zones of an autonomous mobile robot (AMR) using a HAWK stereo camera. Consider three zones in front of the robot (Zones 1-3), corresponding to different alerts and actions the robot must take if an object breaches the zone. Zone 3 generates a warning, Zone 2 sends a signal for the robot to slow, and Zone 1 results in the robot stopping immediately.
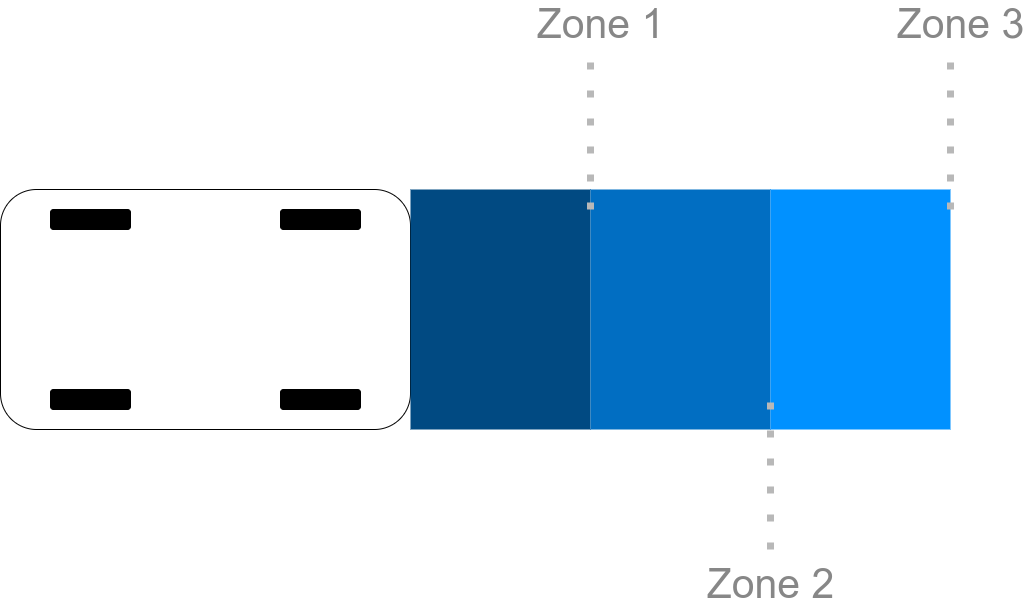
Depending on the velocity of the robot, the distances of the zones might change. For this example, the following distances from the front of the robot are used to define the zones:
Robot Velocity |
Zone 1 (Stop - Red) |
Zone 2 (Slow - Yellow) |
Zone 3 (Warning - Blue) |
|---|---|---|---|
1 m/s |
0.5 m |
0.7 m |
4.0 m |
2 m/s |
2.0 m |
4.0 m |
6.0 m |
3 m/s |
3.5 m |
6.0 m |
9.0 m |
The distances for each zone are converted to disparity values using the following formula:
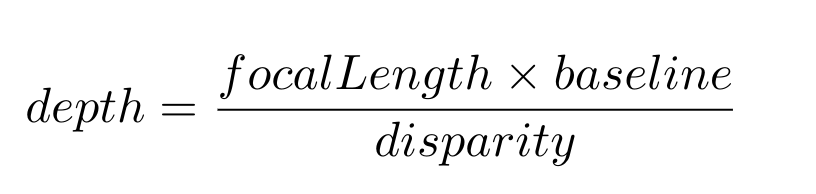
This example uses a HAWK stereo camera with a baseline of 15 cm and focal length of 933 px. And the following disparity values are calculated for each zone:
Robot Velocity |
Zone 1 (Stop - Red) |
Zone 2 (Slow - Yellow) |
Zone 3 (Warning - Blue) |
|---|---|---|---|
1 m/s |
280 px |
200 px |
46 px |
2 m/s |
70 px |
35 px |
23 px |
3 m/s |
40 px |
23 px |
15 px |
This example uses the Isaac ROS Bi3D package to detect when these zones are breached. An example is shown in the table below. Pixels in red indicate that Zone 1 has been breached, yellow indicates Zone 2 has been breached, and blue indicates Zone 3 has been breached.
Input Scene |
1 m/s Zones |
2 m/s Zones |
3 m/s Zones |
|---|---|---|---|
|
|
|
|



