Isaac ROS Jetson#
Overview#
Isaac ROS Jetson simplifies the process of monitoring and managing NVIDIA Jetson, empowering developers to optimize performance, ensure system stability, and streamline development workflows for ROS 2.
What is jetson-stats?#
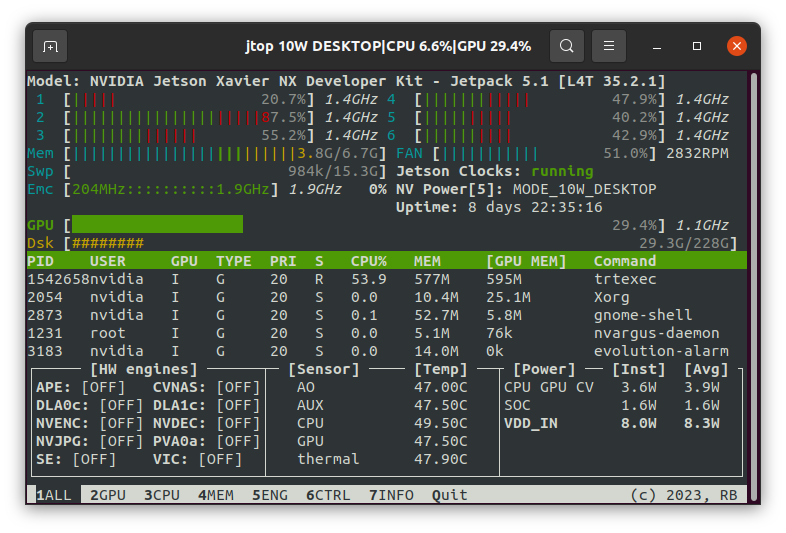
jetson_stats is a comprehensive utility tool specifically designed for NVIDIA Jetson, including the Jetson Nano, Jetson TX1, TX2, Xavier, Orin, and Thor series. It provides a variety of functionalities to monitor and manage the Jetson device’s performance, temperature, power usage, and more.
How Does it Work with Isaac ROS?#
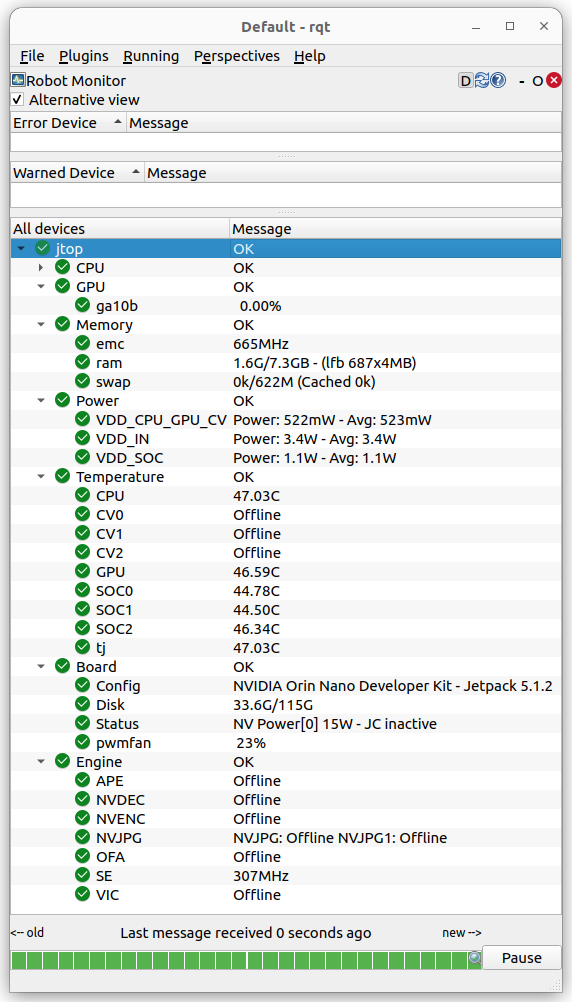
The Isaac ROS Jetson Stats package wraps the output from the jetson_stats package and publishes a diagnostic message with the status of your device. It remaps all board statuses to the desired format for more accessible analysis and monitoring.
- The package provides the following features:
System Monitoring
Fan Control
GPU Frequency Control
Power Management
Thermal Throttling Monitoring
Memory Usage
JetPack Version Detection
To learn more about Jetson Stats, refer to the jetson_stats documentation.
Why use in isaac_ros_jetson on my robotics application?#
ROS designed a tool for aggregating diagnostics messages published from other nodes that publish these messages and republish them in a single diagnostic topic. This makes it easier to monitor and manage the diagnostics of a ROS system, especially in complex robotic systems where multiple nodes may be publishing diagnostic information.
Isaac ROS Jetson provides a set of messages to monitor the health of your board while the robot is working and tracking what is happening.
As an illustration, consider a scenario where your board is under high power demand. In such a case, a node that reads the diagnostics message can dynamically adjust the nvp power mode or even disable certain nodes that are consuming excessive computational resources. This dynamic power management capability is a key feature of the tool.
Using the isaac_ros_jetson package in the Isaac ROS environment can greatly improve the robustness and reliability of your project. This method ensures a consistent and isolated environment, reducing compatibility issues and making deployment across different platforms easier.
Quickstarts#
Packages#
Supported Platforms#
This package is designed and tested to be compatible with ROS 2 Jazzy running on Jetson platforms. See the compatibility of jetson_stats.
Note
x86_64 system is not supported.
Updates#
Date |
Changes |
|---|---|
2025-10-24 |
Support for ROS 2 Jazzy |
2024-12-10 |
Update to be compatible with JetPack 6.1 |
2024-09-26 |
Update for Isaac ROS 3.1 |
2024-05-30 |
Initial release |