Tutorial to Simplify 3D Mesh using Meshlab#
Overview#
This tutorial walks you through the steps to simplify a 3D mesh using Meshlab. Simplification of the mesh reduces the number of vertices and faces, which helps reduce the computational cost of the rendering part of FoundationPose algorithm.
Tutorial Walkthrough#
Download and install Meshlab from the official website.
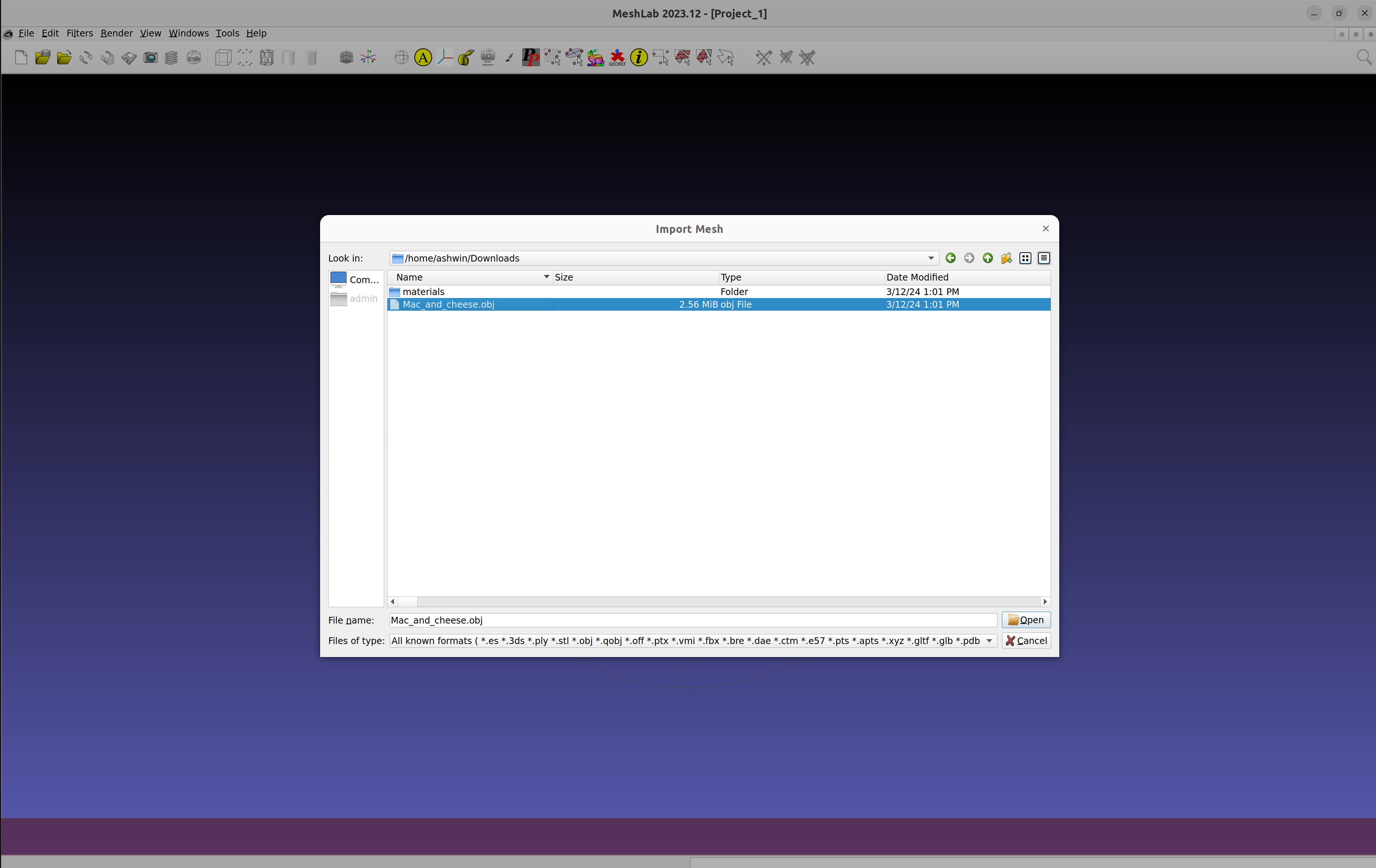
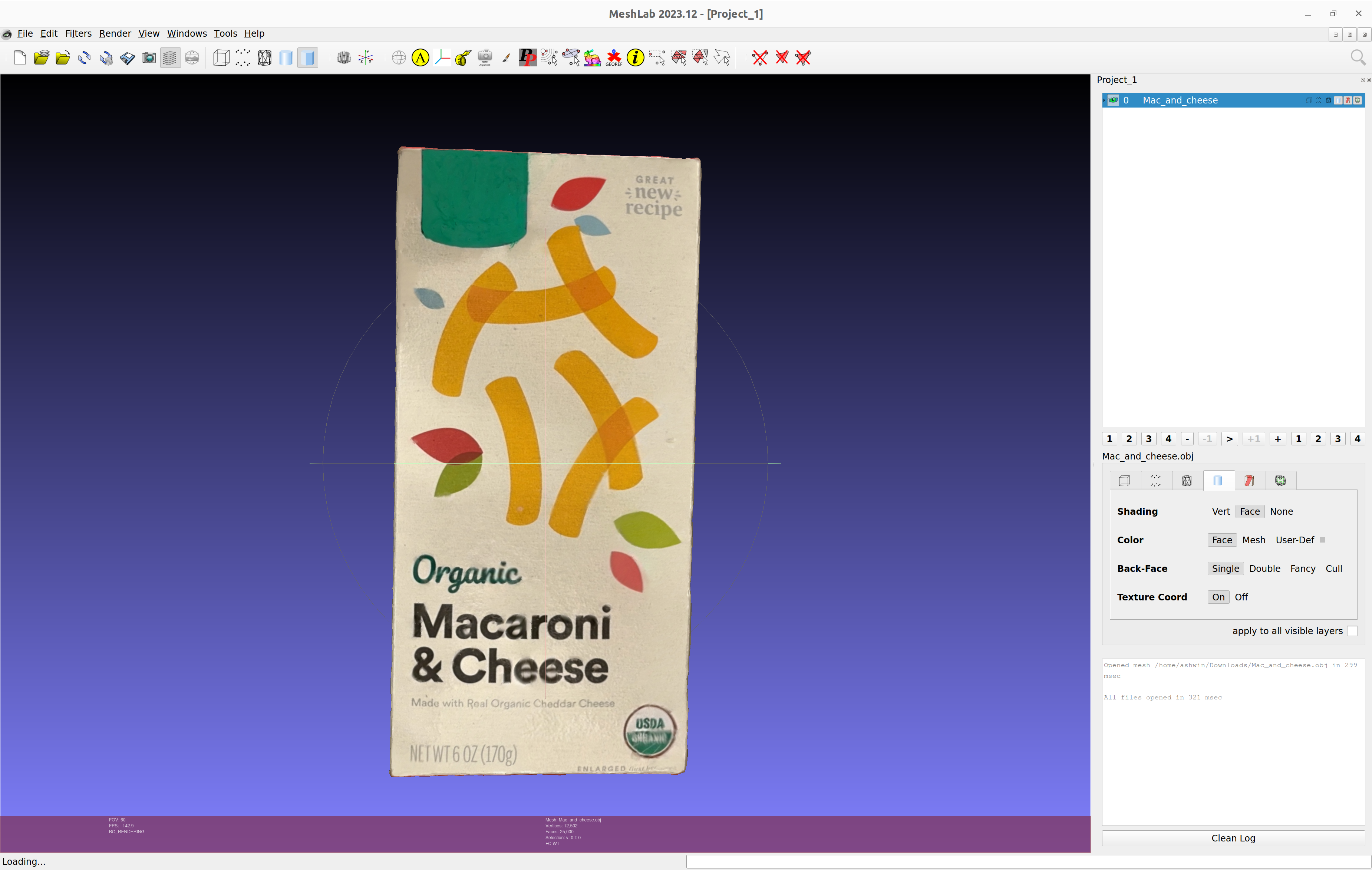
Click on File -> Import Mesh and select the .obj file you want to simplify:
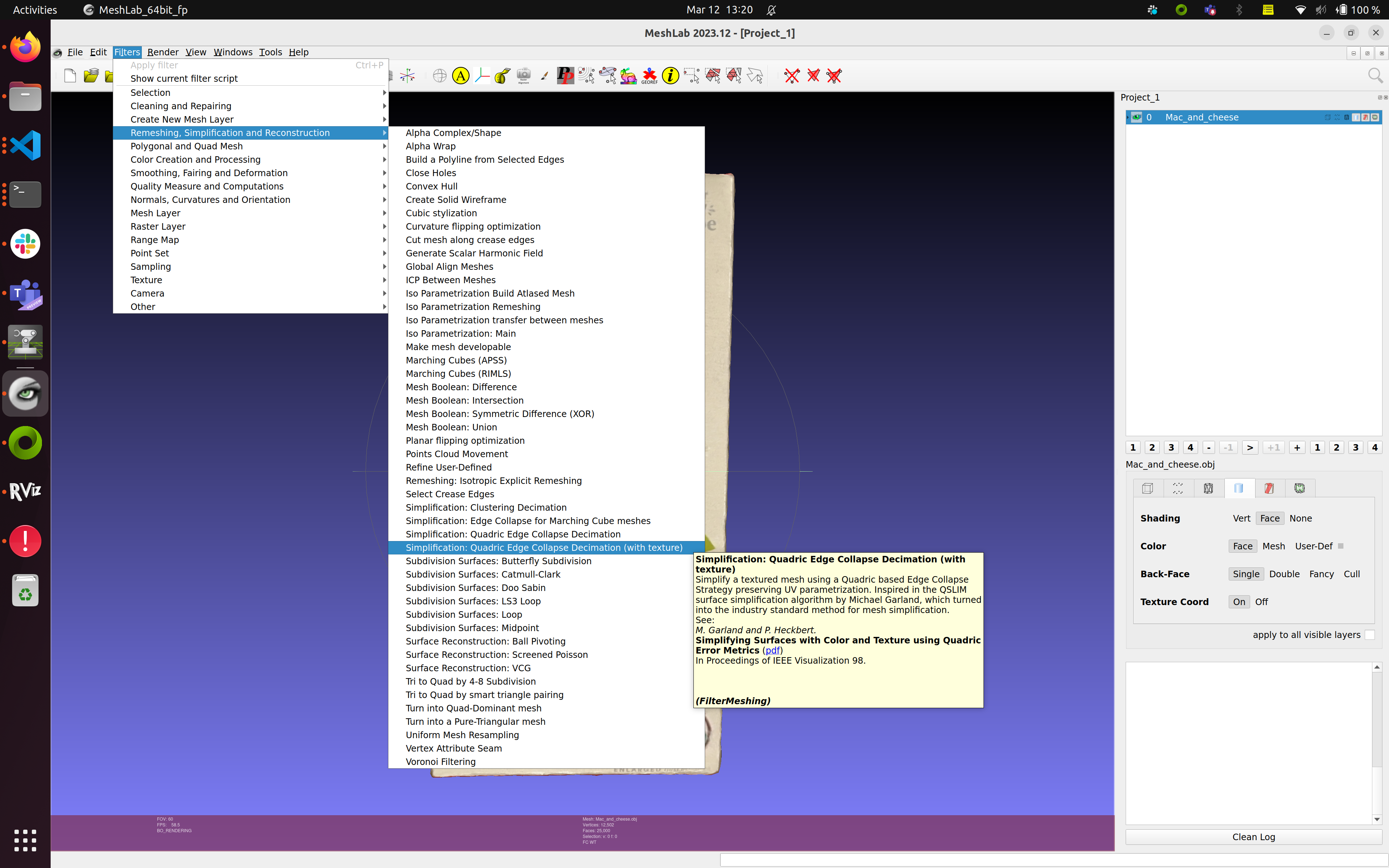
Click on the Filters -> Remeshing, Simplification and Reconstruction -> Simplification : Quadratic Edge Colapse Simplification:
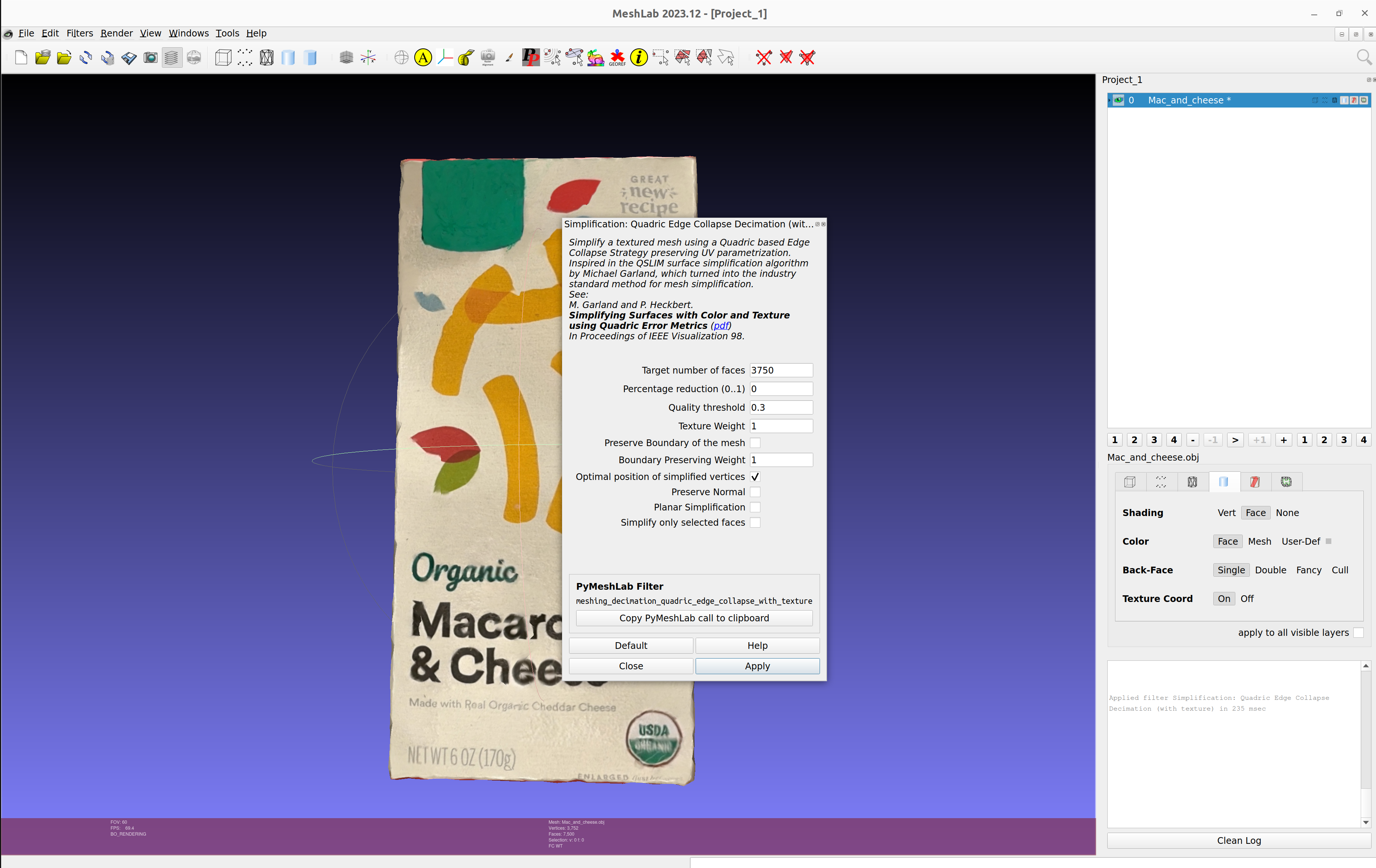
Modify the percentage reduction value and click on Apply and then Close:
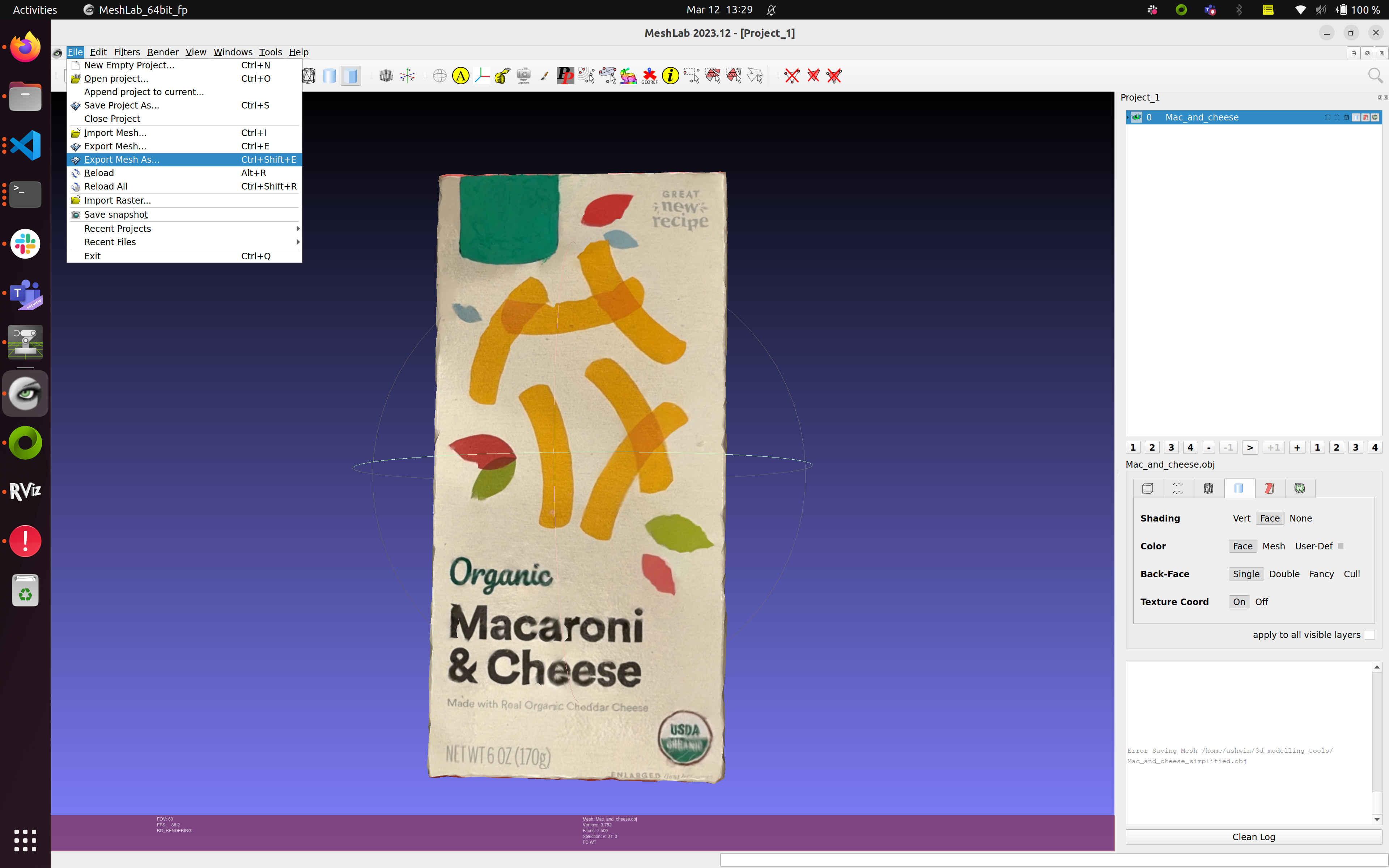
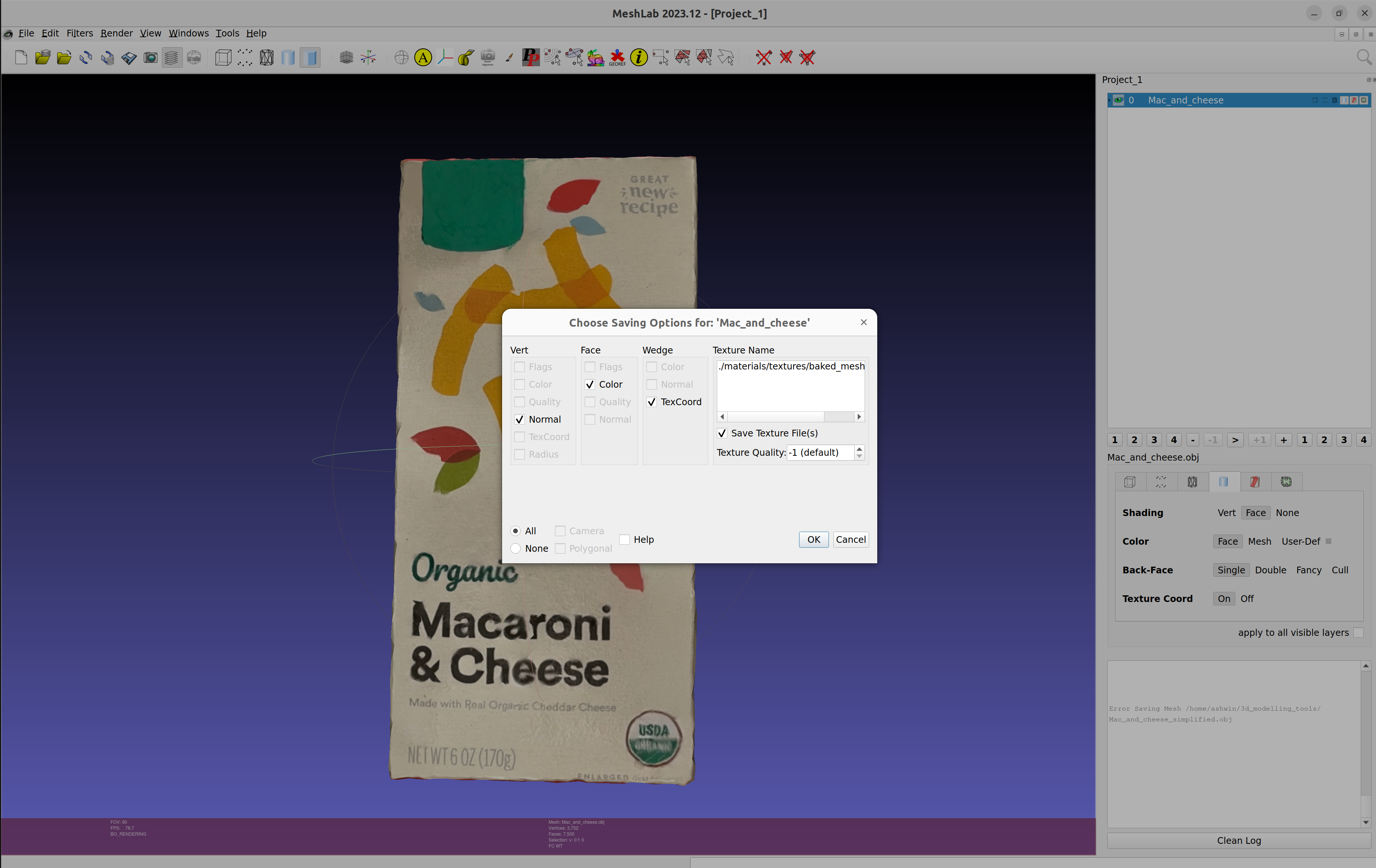
Click on File -> Export Mesh As and select the .obj format: