Tutorial for DNN Image Segmentation with NITROS Bridge
Overview
This tutorial walks you through how to run the isaac_ros_unet on ROS 2 Humble, while playing rosbag and getting the results from ROS Noetic through isaac_ros_nitros_bridge.
The tutorial is based on the ROS1 Bridge documentation.
Note
ROS actions are not supported by the ROS1 Bridge.
Steps
Complete the Isaac ROS Nitros Bridge quickstart.
Complete the Isaac ROS Unet quickstart.
Launch the Docker container using the run_dev.sh script:
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \ ./scripts/run_dev.sh -d ${HOME}/workspaces --docker_arg "--pid=host"
Launch the image converter launch file of
isaac_ros_nitros_bridge:cd /workspaces/isaac_ros-dev/ && \ source install/setup.bash && \ ros2 launch isaac_ros_nitros_bridge_ros2 isaac_ros_nitros_bridge_image_converter.launch.py sub_image_name:=unet/colored_segmentation_mask pub_image_name:=image
Attach a second terminal to the Docker container:
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \ ./scripts/run_dev.sh -d ${HOME}/workspaces
Run the following launch files to spin up
isaac_ros_unet, (you may need to re-download theunet modelsand convert them since now you are in a new container):cd /workspaces/isaac_ros-dev/ && \ source install/setup.bash && \ ros2 launch isaac_ros_unet isaac_ros_unet_tensor_rt.launch.py engine_file_path:=${ISAAC_ROS_WS}/isaac_ros_assets/models/peoplesemsegnet/deployable_quantized_vanilla_unet_onnx_v2.0/1/model.plan input_binding_names:=['input_1:0'] output_binding_names:=['argmax_1'] network_output_type:='argmax' input_image_width:=1200 input_image_height:=632
Open another terminal, launch the Noetic Docker container:
docker run -it --cap-add=SYS_PTRACE --privileged --network host --pid host --ipc host --runtime nvidia --name nitros_bridge -e FASTRTPS_DEFAULT_PROFILES_FILE=/usr/local/share/middleware_profiles/rtps_udp_profile.xml --rm nitros_bridge:latest nitros_bridge_image_converter.yaml nitros_bridge_image_converter.launch /image /ros1_output_image
Attach a second terminal to the Noetic Docker container:
docker exec -it nitros_bridge /bin/bash
Play the rosbag under ROS Noetic:
cd /workspaces/isaac_ros_1-dev/ && \ source install_isolated/setup.bash && \ rosbag play -l "src/isaac_ros_nitros_bridge/resources/unet_sample_data_ros1.bag"
Attach a third terminal to the Noetic Docker container:
docker exec -it nitros_bridge /bin/bash
Use
rostopicto echo in the container:cd /workspaces/isaac_ros_1-dev && \ source install_isolated/setup.bash && \ rostopic echo /ros1_output_image
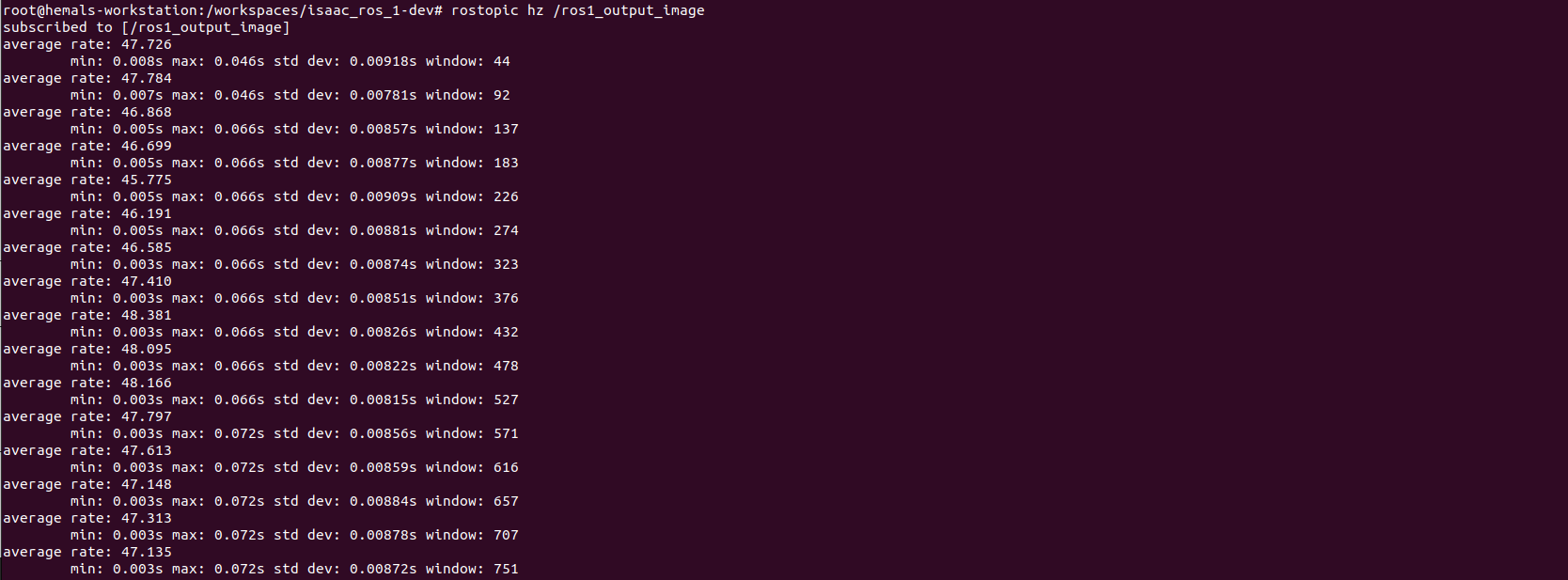
Example output use
rostopic hz: