CUDA with NITROS
Overview
CUDA is a parallel computing programming model and helps robotic applications to implement functions that would otherwise be too slow on a CPU.
CUDA implemented in a ROS 2 node can take advantage of NITROS, the Isaac ROS implementation of type adaptation & type negotiation which enables accelerated computing in ROS 2.
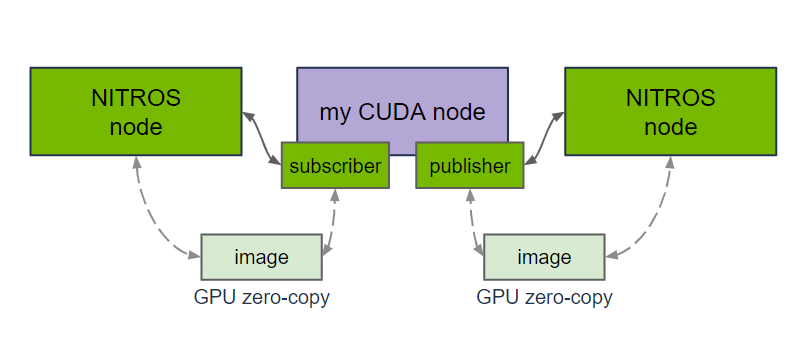
By using the NITROS publisher, CUDA code in a ROS node can share its output in GPU accelerated memory to NITROS enabled Isaac ROS nodes. This improves performance by avoiding CPU memory copies, and increasing the parallel compute between the GPU compute and CPU processing. NITROS maintains compatibility with other ROS nodes subscribing to the topic such as RViz.
By using the NITROS subscriber, CUDA code in a ROS node can receive its input in GPU accelerated memory from a NITROS enabled Isaac ROS node, or another CUDA enabled ROS node publishing by using a NITROS subscriber. This has the same benefits of reducing CPU memory copies and increasing parallel computing between the GPU and CPU.
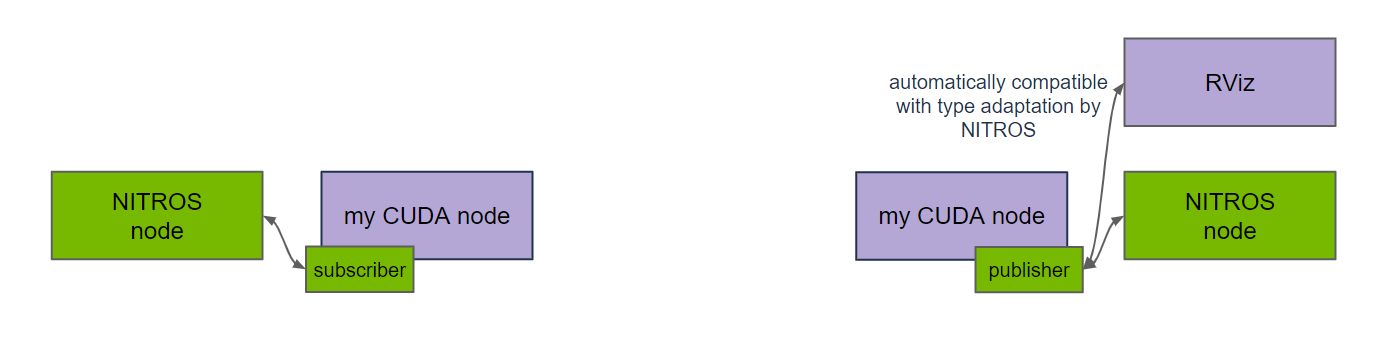
NITROS publisher and NITROS subscriber enable many design patterns compatible with Isaac ROS accelerate computing nodes, and traditional CPU nodes. For example publishing from a CUDA node directly to an Isaac ROS node, or visa-versa from an Isaac ROS node to a CUDA node. A CUDA node can be inserted between two Isaac ROS nodes, or even use multiple CUDA nodes in succession, all with the benefit of CUDA accelerated computing in each node. This creates more modular software designs, as CUDA accelerated functions can be packaged in individual nodes, instead of packing them together into a larger single node.
Core Concepts
Managed NITROS Publisher
The Managed NITROS Publisher provides a familiar interface
for publishing messages into NITROS-enabled graphs. The API is
comparable to the standard rclcpp::Publisher API, making it easy to
add a Managed NITROS Publisher to an existing ROS 2 node.
Managed NITROS Publishers are specifically designed to publish
NITROS-typed messages. These NITROS types are listed under the
isaac_ros_nitros_types subfolder.
Note
Currently, the Managed NITROS Publisher is only compatible
with the isaac_ros_nitros_tensor_list_type and isaac_ros_nitros_image_type.
These types enable you to send and receive tensors and images to and from packages in Isaac ROS DNN
Inference.
Managed NITROS Subscriber
The Managed NITROS Subscriber is analogous to the Managed NITROS
Publisher, offering a straightforward, rclcpp::Subscriber-like
interface for subscribing to messages from NITROS-enabled graphs.
Managed NITROS Subscribers are specifically designed to receive
NITROS-typed messages. These NITROS types are listed under the
isaac_ros_nitros_types subfolder.
Note
Currently, the Managed NITROS Subscriber is only compatible
with the isaac_ros_nitros_tensor_list_type and isaac_ros_nitros_image_type.
NITROS Builders
NITROS Builders are a series of utility classes that streamline the process of creating a NITROS-typed message. These classes offer a builder-style interface, allowing developers to specify relevant fields for object construction one at a time:
using namespace nvidia::isaac_ros::nitros;
NitrosTensorList tensor_list = NitrosTensorListBuilder()
.WithHeader(ros_header)
.AddTensor("tensor_1", foo_tensor)
.AddTensor("tensor_2", bar_tensor)
.Build();
The collection of NITROS Builders also includes additional builders that
construct individual components of the broader NITROS types. For
example, a NitrosTensorBuilder can be used to produce a
NitrosTensor that is subsequently consumed by a
NitrosTensorListBuilder.
NITROS Views
NITROS Views are a series of utility classes that simplify the process of accessing fields of a NITROS-typed message. These classes offer an analogous interface to the NITROS Builder, allowing developers to retrieve specific portions of a composite structure and process them accordingly.
Managed NITROS Message Filter Subscriber
The Managed NITROS Message Filter Subscriber is analogous to the Message Filter Subscriber ,
offering a message_filters::Subscriber-like
interface for subscribing to messages from NITROS-enabled graphs. This subscriber can be passed to a
message_filters::Synchronizer to synchronize messages from NITROS and non-NITROS topics.
The Managed NITROS Message Filter Subscriber is implemented as a template to work with the NITROS Views mentioned above.
Please refer to the Message Filter Subscriber for more details. You can also find an example in the NitrosCameraDropNode
isaac_ros_nitros_topic_tools/isaac_ros_nitros_camera_drop_node
Standard Usage
The standard pattern for using Managed NITROS involves 3 key steps:
Encoding arbitrary data into an appropriate NITROS-type message using a Custom NITROS encoder node
Processing the NITROS-type message using NITROS-enabled ROS 2 nodes
Decoding an output NITROS-type message into an arbitrary format using a Custom NITROS decoder node
For example, a graph for performing DNN-based segmentation on pointclouds might involve:
A Custom NITROS encoder node that converts a
sensor_msgs/PointCloud2into aNitrosTensorListThe Isaac ROS TensorRT node that performs DNN inference on the TensorRT backend, taking in an input
NitrosTensorListand producing an outputNitrosTensorListA Custom NITROS decoder node that converts the output
NitrosTensorListinto a segmentedsensor_msgs/PointCloud2
Examples
Custom NITROS String Encoder and Decoder
The isaac_ros_managed_nitros_examples/custom_nitros_string package contains a minimal example that demonstrates how a pair of Custom NITROS encoder and decoder nodes can leverage Managed NITROS utilities.
The included launch test uses a minimal graph of just two nodes:
StringEncoderNode that encodes a
std_msgs/Stringmessage into aNitrosTensorListStringDecoderNode that decodes a
NitrosTensorListback into astd_msgs/String
Note
Because there is no NITROS type designed specifically for
strings, this examples uses the NitrosTensorList type to encode
string data. The flexibility of the NitrosTensorList format
supports the encoding of arbitrary data.
The StringEncoderNode’s implementation
demonstrates usage of the NITROS Builder utilities. The
StringEncoderNode::InputCallback function begins by allocating a
CUDA buffer to store the received std_msgs/String’s data. In this
minimal example, the character bytes are copied over to the CUDA buffer
without any need for additional encoding. Then, a
NitrosTensorBuilder is used to build a NitrosTensor, which is
then added to a NitrosTensorListBuilder with the
name "input_tensor". Finally, the NitrosTensorListBuilder::Build
method produces the output NitrosTensorList that is published via
the StringEncoderNode’s Managed NITROS publisher.
The StringDecoderNode’s implementation
demonstrates usage of the NITROS View utilities. The
StringDecoderNode::InputCallback function begins by resizing a
std::string buffer to store the data that will eventually be
extracted from the NitrosTensorList. The Managed NITROS Subscriber
receives a NitrosTensorListView, through which it extracts the
NitrosTensorView corresponding to "input_tensor" using the
NitrosTensorListView::GetNamedTensor method. Since the data in
NitrosTensorView’s CUDA buffer was originally encoded in a trivial
way, the decoding is similarly straightforward: the character bytes are
copied over without any need for additional decoding. Finally, the
std::string is copied to a std_msgs/String message and published
with a standard publisher.
Custom NITROS Image Builder and Viewer
The isaac_ros_managed_nitros_examples/custom_nitros_image package contains an intermediate example of Managed NITROS functionality for passing images.
The included launch test uses a minimal graph of just two nodes:
1. GpuImageBuilderNode
that encodes a sensor_msgs/Image message into a NitrosImage.
2. GpuImageViewerNode
that decodes a NitrosImage back into a sensor_msgs/Image.
The GpuImageBuilderNode’s implementation
demonstrates usage of the NITROS Builder utilities. The
GpuImageBuilderNode::InputCallback function begins by allocating a
CUDA buffer to store the received sensor_msgs/Image’s data. In
this minimal example, the bytes are copied over to the CUDA buffer
without any interleaving or other processing. Then, a
NitrosImageBuilder is used to build a NitrosImage from the ROS
header, appropriate sensor_msgs-standard image encoding, image
dimensions, and CUDA buffer from the previous step. The
NitrosImageBuilder::Build method produces the output NitrosImage
that is published via the GpuImageBuilderNode’s Managed NITROS
publisher.
The GpuImageViewerNode’s implementation
demonstrates usage of the NITROS View utilities. The
GpuImageViewerNode::InputCallback function begins by creating a
sensor_msgs/Image message and populating its basic fields through
the NitrosImageView object’s straightforward getters. Next, the
output image’s data vector is resized to ensure it will appropriately
fit the actual image data. Finally, the image’s data bytes are copied
over without any additional processing, and the output message is
published with a standard publisher.
Custom NITROS DNN Image Encoder
The isaac_ros_managed_nitros_examples/custom_nitros_dnn_image_encoder package contains an advanced example of Managed NITROS functionality for encoding images as tensors for DNN inference.
As shown in the included launch file,
this package’s ImageEncoderNode has identical functionality to the standard Isaac ROS DNN Image Encoder Node.
This example leverages NVIDIA’s CV-CUDA library to perform the core image normalization operations. CUDA with NITROS unlocks the full value of libraries like CV-CUDA for high performance robotics applications.
Managed NITROS Message Filter Synchronization
The isaac_ros_nitros_topic_tools/isaac_ros_nitros_camera_drop_node package contains an example of synchronize NITROS and non-NITROS topics using Managed NITROS Message Filter Subscriber.
As shown in the included launch file,
this package’s NitrosCameraDropNode has similar functionality to the standard DropNode, but
uses the Managed NITROS Message Filter Subscriber to synchronize messages from NITROS and non-NITROS topics.