isaac_ros_hesai
Source code on GitHub.

Overview
A LIDAR uses light in the form of a pulsed laser to measure ranges (variable distance) as part of a perception for understanding of the robot and its environment.
The isaac_ros_hesai driver provides support for the XT32 mid-range LIDAR that provides 32 beam, 360 degree sensing with from 0.05m to >100m with a field of view of -16 to 31 degrees.
Quickstart
Set Up Development Environment
Set up your development environment by following the instructions in getting started.
Clone
isaac_ros_commonunder${ISAAC_ROS_WS}/src.cd ${ISAAC_ROS_WS}/src && \ git clone -b release-3.1 https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_common.git isaac_ros_common
(Optional) Install dependencies for any sensors you want to use by following the sensor-specific guides.
Warning
We strongly recommend installing all sensor dependencies before starting any quickstarts. Some sensor dependencies require restarting the Isaac ROS Dev container during installation, which will interrupt the quickstart process.
Build isaac_ros_hesai
Launch the Docker container using the
run_dev.shscript:cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \ ./scripts/run_dev.sh
Install the prebuilt Debian package:
sudo apt-get install -y ros-humble-isaac-ros-hesai
Clone this repository under
${ISAAC_ROS_WS}/src:cd ${ISAAC_ROS_WS}/src && \ git clone -b release-3.1 https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_nova.git isaac_ros_nova
Launch the Docker container using the
run_dev.shscript:cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \ ./scripts/run_dev.sh
Use
rosdepto install the package’s dependencies:rosdep install --from-paths ${ISAAC_ROS_WS}/src/isaac_ros_nova/isaac_ros_hesai --ignore-src -y
Build the package from source:
cd ${ISAAC_ROS_WS} && \ colcon build --symlink-install --packages-up-to isaac_ros_hesai
Source the ROS workspace:
Note
Make sure to repeat this step in every terminal created inside the Docker container.
Because this package was built from source, the enclosing workspace must be sourced for ROS to be able to find the package’s contents.
source install/setup.bash
Run Launch File
Continuing inside the Docker container, launch the Hesai driver:
ros2 launch isaac_ros_hesai hesai.launch.py
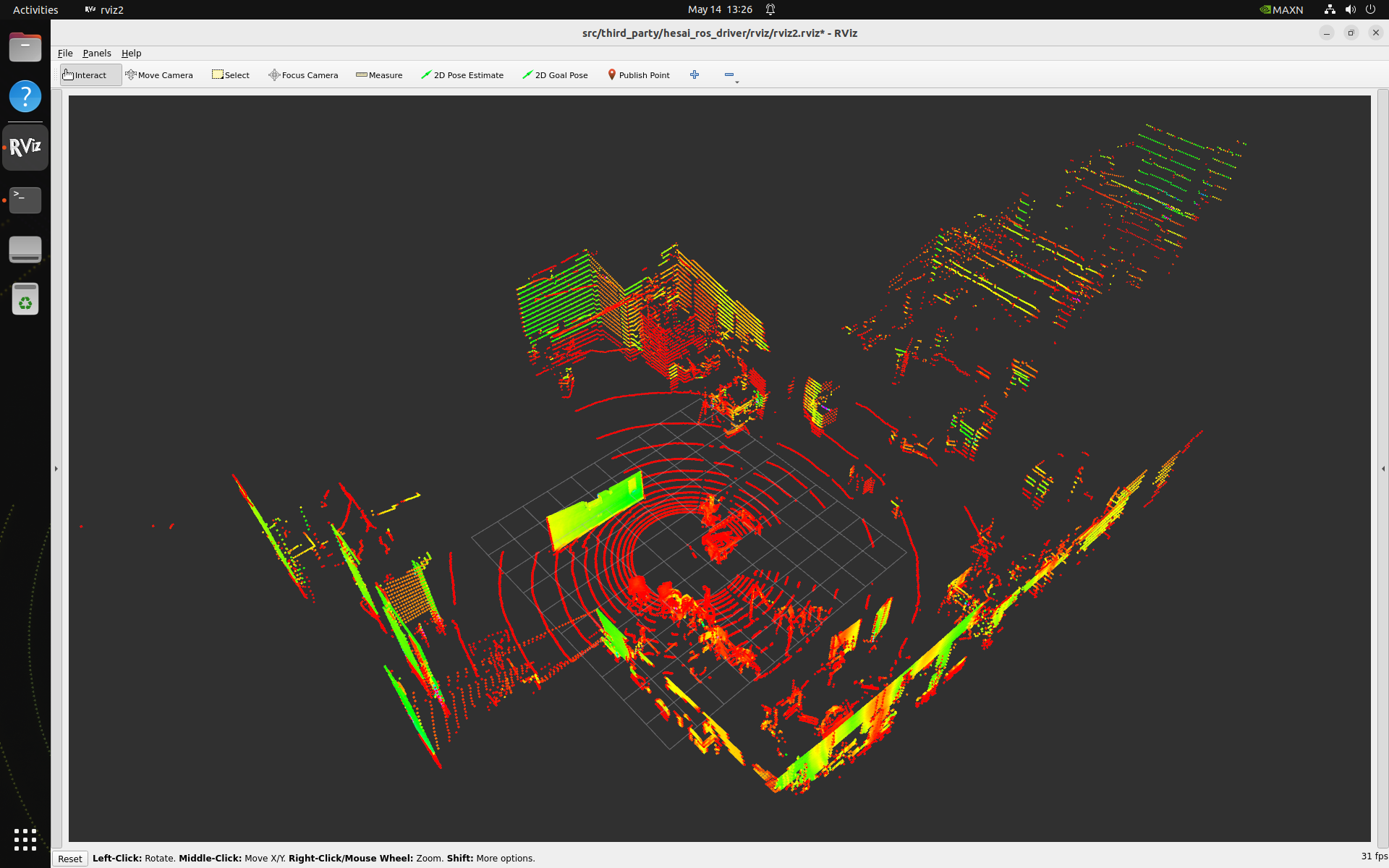
Visualize Results
Open a new terminal inside the Docker container:
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \ ./scripts/run_dev.sh
Use
rviz2to visualize the point cloud:rviz2 -d $(ros2 pkg prefix --share isaac_ros_hesai)/config/hesai.rviz
Troubleshooting
Isaac ROS Troubleshooting
For solutions to problems with Isaac ROS, see troubleshooting.
API
Usage
ros2 launch isaac_ros_hesai hesai.launch.py namespace:=<Namespace> replay:=<Enable replay from rosbag>
ROS Topics Published
ROS Topic |
Interface |
Description |
|---|---|---|
|
Lidar UDP packets. |
|
|
Lidar point cloud. |